
Open Loop vs Closed Loop System: nyckelskillnader, arbete, fördelar och applikationer
Open loop och closed loop system förklarar hur ett system reagerar när du ger det en input.I den här artikeln kommer du att lära dig vad varje system gör, hur det fungerar och varför feedback är viktigt för att kontrollera resultaten.Du kommer också att se hur deras komponenter och applikationer skiljer sig åt.Detta gör det lättare för dig att förstå var varje system är vanligt förekommande.Katalog
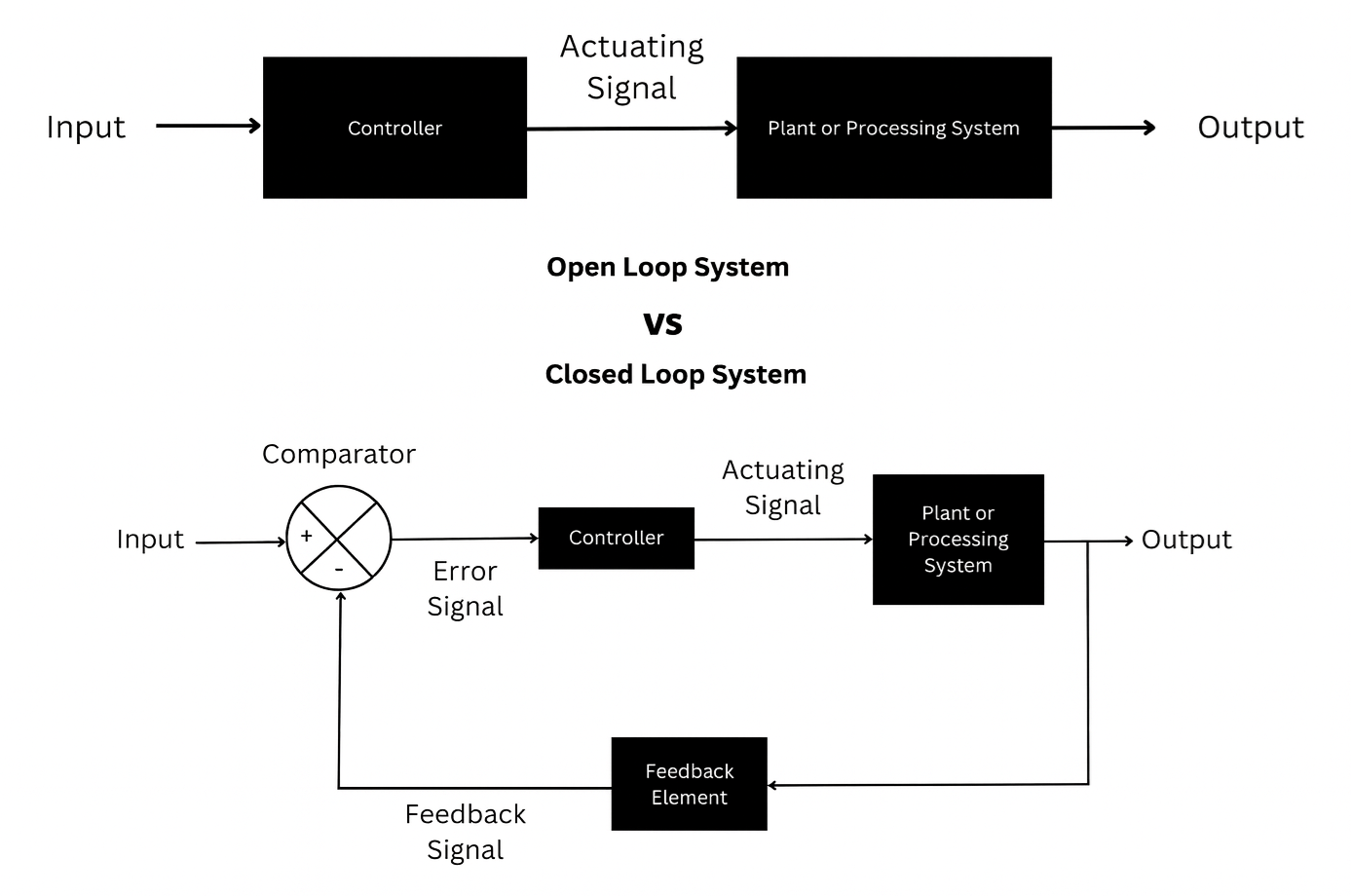
Figur 1. System med öppen loop vs sluten loop
Vad är ett Open Loop System?
Ett öppet system är en typ av styrsystem där utsignalen inte övervakas eller jämförs med ingången.Kontrollåtgärden tillämpas enbart baserat på den givna input, utan att ta hänsyn till det faktiska resultatet som produceras av systemet.Eftersom det inte finns någon återkopplingsmekanism kan systemet inte upptäcka eller korrigera fel på egen hand.Varje variation eller störning påverkar direkt utmatningen utan justering.Systemets beteende beror helt på fördefinierade inställningar eller kalibrering.Styrsystem med öppen slinga definieras vanligtvis av sin enkelhet och avsaknad av automatisk felkorrigering.
Vad är ett slutet system?
Ett slutet system är ett styrsystem som kontinuerligt jämför den faktiska uteffekten med den önskade ingången med hjälp av återkoppling.Skillnaden mellan ingången och utgången, kallad felsignalen, bestämmer kontrollåtgärden.Denna feedback-baserade jämförelse gör att systemet reagerar automatiskt på avvikelser.Styrenheten justerar sin uteffekt för att minska eller eliminera felet.Som ett resultat bibehåller systemet närmare anpassning till den önskade prestandan.Slutna system definieras av deras förmåga att självreglera genom återkoppling.
Komponenter i Open Loop vs Closed Loop System
|
Komponent |
Öppna slinga
System |
Stängt
Loop System |
|
Ingång /
Referenssignal |
Använder en ingång
för att starta driften, men det jämförs inte med utgången. |
Använder en ingång
som kontinuerligt jämförs med den faktiska produktionen. |
|
Styrenhet |
Skickar en fast
kontrollåtgärd baserad endast på inmatningen. |
Justerar
kontrollåtgärder kontinuerligt baserat på feedback. |
|
Ställdon /
Kontrollelement |
Fungerar
enligt kontrollantens kommando utan verifiering. |
Modifierar dess
åtgärd baserad på feedback från systemet. |
|
Utgång /
Process |
Utgång är
produceras men inte mäts eller korrigeras. |
Utgång är
övervakas och korrigeras för att matcha det önskade värdet. |
|
Sensor /
Mätenhet |
Det finns ingen sensor
används för att mäta output. |
Sensorer
mäta uteffekt och skicka data till regulatorn. |
|
Feedback
Väg/jämförare |
Ingen feedback
sökväg eller feljämförelse. |
Återkopplingsväg
och komparator är väsentliga för feldetektering. |
Hur fungerar ett system med öppen och sluten slinga?
Öppna Loop System

Figur 2. Blockdiagram för Open Loop System
Ett system med öppen slinga fungerar genom att bearbeta insignalen utan att kontrollera den resulterande utsignalen.Som visas i figuren tillförs ingången direkt till regulatorn, som genererar en manöversignal.Denna manöversignal skickas till anläggningen eller bearbetningssystemet för att producera utsignalen.Utgången rör sig endast framåt och returneras inte till styrenheten i någon form.Eftersom det inte finns någon återkopplingsväg har regulatorn ingen information om den faktiska utgången.Systemet slutför sin funktion när utdata produceras, oavsett om det matchar det avsedda resultatet.
Closed Loop System
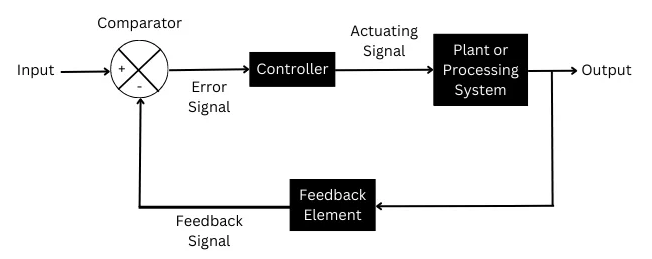
Figur 3. Blockdiagram för system med sluten slinga
Ett slutet system fungerar genom att kontinuerligt jämföra utsignalen med ingången för att styra systemets respons.I figuren skickas ingången först till en komparator, där den jämförs med återkopplingssignalen från utgången.Denna komparator producerar en felsignal som representerar skillnaden mellan den önskade ingången och den faktiska utsignalen.Felsignalen skickas sedan till styrenheten, som genererar en lämplig manöversignal.Denna manöversignal driver anläggningen eller bearbetningssystemet att producera utsignalen.Utsignalen matas tillbaka genom ett återkopplingselement till komparatorn, vilket bildar en komplett slinga som tillåter kontinuerlig justering.
Tillämpningar av Open Loop vs Closed Loop System
|
Ansökan
Område |
Öppna slinga
System |
Stängt
Loop System |
|
Hushåll
Vitvaror |
Tvätt
maskiner (timerbaserad): Fungerar under en fast tid utan att kontrollera utgången. |
Termostater
i luftkonditioneringsapparater och kylskåp: Justera temperaturen med hjälp av feedback. |
|
Uppvärmning och
Matlagning |
Mikrovågsugn
ugnar (tidsstyrda): Uppvärmningen beror endast på förinställd tid. |
Temperaturstyrd
ugnar: Reglera värmen med hjälp av sensorer. |
|
Trafik och
Transport |
Fast tid
trafikljus: Ändra signaler baserat på förinställd tidpunkt. |
Kryssning
kontrollsystem: Upprätthåll fordonets hastighet med hjälp av feedback. |
|
Industriellt
Maskiner |
Transportör
remmar: Kör med konstant hastighet utan lastövervakning. |
Industriellt
motorhastighetskontroll: Håller hastigheten under varierande belastningar. |
|
Kraft och
Elektriska system |
Grundläggande batteri
laddare: Mata fast spänning eller ström. |
Automatisk
spänningsregulatorer (AVR): Bibehåll stabil utspänning. |
|
Automation
och kontroll |
Timerbaserad
bevattningssystem: Fungerar under förinställda varaktigheter. |
PLC-baserad
processkontrollsystem: Justera driften med hjälp av sensorfeedback. |
|
Robotik och
Rörelsekontroll |
Enkelt
repetitiva maskiner: Utför fasta rörelser. |
Servomotorer
och robotarmar: Kontrollera position och hastighet exakt. |
|
Vätska och
Nivåkontroll |
Manuellt vatten
pumpar: Fungerar utan nivåavkänning. |
Automatisk
vattennivåregulatorer: Starta och stoppa pumpar baserat på återkoppling. |
Fördelar med Open Loop och Closed Loop System
Fördelar med Open Loop System
• Enkel design och lätt att förstå
• Låg kostnad tack vare färre komponenter
• Snabb svarstid
• Enkel konstruktion och underhåll
• Inga sensorer eller återkopplingselement krävs
• Stabil drift utan återkopplingsinducerade svängningar
• Idealisk för fasta och förutsägbara driftsförhållanden
Fördelar med Closed Loop System
• Hög noggrannhet genom kontinuerlig återkoppling
• Automatisk feldetektering och korrigering
• Mindre påverkad av yttre störningar
• Bättre prestanda under varierande belastningsförhållanden
• Förbättrad tillförlitlighet och konsekvens
• Förmåga att stabilisera instabila processer
• Lämplig för komplexa och precisionsbaserade applikationer
Nackdelar med Open Loop och Closed Loop Systems
Nackdelar med Open Loop System
• Ingen återkoppling, så fel kan inte korrigeras
• Lägre noggrannhet än slutna system
• Mycket känslig för störningar och parameterändringar
• Effekten beror helt på kalibrering
• Dålig anpassningsförmåga till förändrade förhållanden
• Ej lämplig för komplex eller precisionskontroll
Nackdelar med Closed Loop System
• Mer komplex design och implementering
• Högre kostnad på grund av sensorer och återkopplingskomponenter
• Kräver regelbundet underhåll och kalibrering
• Långsammare respons på grund av återkopplingsbearbetning
• Risk för instabilitet eller oscillationer om dåligt utformad
• Felaktiga återkopplingselement kan påverka systemets prestanda
Open Loop System s Closed Loop System
|
Parameter |
Öppna slinga
System |
Stängt
Loop System |
|
Feedback
Närvaro |
Ingen feedback
sökväg används. |
Återkopplingsväg
är en viktig del av systemet. |
|
Kontroll
Åtgärd |
Kontrollåtgärd
beror endast på ingångssignalen. |
Kontroll
åtgärd beror på felet mellan input och output. |
|
Fel
Rättelse |
Fel kan inte
detekteras eller korrigeras automatiskt. |
Fel är
kontinuerligt upptäckt och korrigerad. |
|
Noggrannhet |
Låg noggrannhet
på grund av frånvaro av feedback. |
Hög noggrannhet
på grund av kontinuerlig återkopplingskontroll. |
|
Komplexitet |
Enkelt system
struktur och design. |
Mer komplex
på grund av sensorer och återkopplingskretsar. |
|
Stabilitet
|
Naturligtvis
stabil under fasta förhållanden. |
Stabilitet
beror på korrekt feedbackdesign. |
|
Svarstid |
Snabbare
svar eftersom ingen återkopplingsbehandling är inblandad. |
Något
långsammare på grund av feedback och jämförelseprocess. |
|
Störning
Hantering |
Högt
påverkas av yttre störningar. |
Mindre påverkad
eftersom återkoppling kompenserar störningar. |
|
Tillförlitlighet |
Mindre pålitlig
när driftsförhållandena ändras. |
Mer pålitlig
under varierande förhållanden. |
|
Sensor
Krav |
Sensorer är
krävs inte. |
Sensorer är
krävs för att mäta output. |
|
Underhåll |
Lätt att
bibehålla på grund av enkel struktur. |
Kräver
regelbundet underhåll och kalibrering. |
|
Anpassningsförmåga |
Stackars
anpassningsförmåga till belastning eller miljöförändringar. |
Hög
anpassningsförmåga till förändringar och störningar. |
Slutsats
Open loop-system är enkla och billiga men kan inte korrigera fel eftersom de inte använder någon återkoppling.Slutna system använder feedback för att justera utdata, vilket gör dem mer exakta och tillförlitliga.Skillnaderna i komponenter, drift, fördelar och begränsningar visar hur feedback påverkar systemets beteende.Valet mellan dessa system beror på nödvändig precision, komplexitet, kostnad och driftsförhållanden.
Om oss
ALLELCO LIMITED
Läs mer
Snabb förfrågan
Skicka en förfrågan, vi svarar omedelbart.
Vanliga frågor [FAQ]
1. Används fortfarande öppna system inom modern automation?
Ja, system med öppen slinga används fortfarande i enkla, lågkostnadsapplikationer där precision och återkoppling inte krävs.
2. Vilket system är bättre för industriella styrtillämpningar?
Slutna system är bättre för industriell kontroll eftersom de hanterar störningar, belastningsförändringar och noggrannhetskrav.
3. Kräver slutna system alltid sensorer?
Ja, sensorer är viktiga i system med sluten slinga för att mäta uteffekt och ge feedback till styrenheten.
4. Kan ett öppet system omvandlas till ett slutet system?
Ja, att lägga till sensorer, en återkopplingsväg och en komparator kan omvandla ett öppet system till ett slutet system.
5. Varför är öppna system snabbare än slutna system?
Open loop-system svarar snabbare eftersom det inte finns någon återkopplingsbearbetning eller jämförelsefördröjning.

Programmerbar logisk styrenhet (PLC): Definition, typer, arbetsprincip och tillämpningar
på 2025/12/15
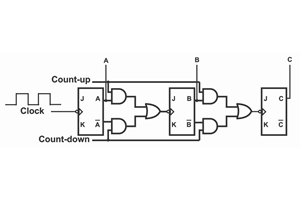
Upp/ner räknare förklaras: funktioner, funktion, typer, användningsområden och jämförelse av räknare
på 2025/12/13
Populära inlägg
-

Komplexa instruktionsuppsättningsdatorer: Hur de ändrade datoranvändning?
på 8000/06/4 148298
-

USB-C-pinout och funktioner
på 2000/06/4 129900
-

Använda Xilinx Unified Simulation Primitives: En omfattande guide till FPGA -design och simulering
på 1600/06/4 111778
-

Strömförsörjningsspänningar i elektronik: Betydelsen av VCC, VDD, VEE, VSS och GND
på 0400/06/4 93322
-

RJ45 -anslutningsguide: Pinout, ledningar, kabeltyper och användningar
på 1970/01/1 91982
-

Den ultimata guiden för trådfärgkoder i moderna elektriska system
Hur våra elektriska system använder färger är inte bara för utseende.Varje trådfärg indikerar nu en specifik funktion, vilket gör det lättare att identifiera och hantera elektriska komponenter korr...på 1970/01/1 76110
-

Kvalitet (Q) Faktor: Ekvationer och applikationer
Kvalitetsfaktorn, eller 'Q', är viktig när man kontrollerar hur väl induktorer och resonatorer arbetar i elektroniska system som använder radiofrekvenser (RF).'Q' mäter hur väl en krets minimerar e...på 1970/01/1 74007
-

Purge Valve Guide: Funktion, symtom, testning och ersättning för optimal motorprestanda
Purge -ventilen är en viktig del av bilens system som hjälper till att hålla luften ren genom att hantera bränsleångor innan de kan fly in i atmosfären.Detta hjälper inte bara miljön genom att mins...på 1970/01/1 68014
-
Förstå kondensatorer och deras symboler i kretsdiagram
Kondensatorer är små delar som används i nästan alla elektroniska enheter.De lagrar och släpper elektrisk energi och finns i saker som strömförsörjning, radioapparater och kretsar som hjälper till ...på 2000/06/4 57886
-

A23 -batterispecifikationer och kompatibilitet
A23-batteriet är ett litet, cylinderformat batteri med högspänning.Även kallad 23A, 23AE eller MN21, den körs vid 12 volt och mycket högre än AA- eller AAA -batterier.Dess speciella design...på 1970/01/1 57467
Hett artikelnummer
-

FH26-13S-0.3SHW(98)
Hirose Electric Co Ltd
CONN FPC BOTTOM 13POS 0.3MM R/A
C8051F530A-IMR
Silicon Labs
IC MCU 8BIT 8KB FLASH 20QFN
1N1202B
Solid State Inc.
DIODE GEN PURP 200V 12A DO4
CL21B331KBANNND
Samsung Electro-Mechanics
CAP CER 330PF 50V X7R 0805
PCMB053T-1R0MS
Susumu
FIXED IND 1UH 7A 14 MOHM SMD
X9015US8IZ
Renesas Electronics America Inc
IC DGTL POT 50KOHM 32TAP 8SOIC
DM74LS112AN
onsemi
IC FF JK TYPE DUAL 1BIT 16DIP
C1608CH1H090C080AA
TDK Corporation
CAP CER 9PF 50V CH 0603
1SV270TPH3F
Toshiba Semiconductor and Storage
DIODE VARICAP VCO UHF USC
EPF6010ATC100-2N
Intel
IC FPGA 71 I/O 100TQFP
532L25DT19M2000
CTS Electronic Components
OSC TCXO 19.2MHZ CLPSNWV SMD
MT53D768M64D4NZ-046 WT:A
Micron Technology Inc.
IC DRAM 48GBIT 2.133GHZ FBGA QDP
MA3X704E0L
Panasonic Electronic Components
DIODE ARRAY SCHOTTKY 30V MINI3
89047-112LF
Amphenol ICC (FCI)
CONN RCPT 30POS EDGE MNT
BDW94C
onsemi
TRANS PNP DARL 100V 12A TO220-3
FAN7621BSJ
onsemi
IC OFFLINE SW HALF-BRDG 16SOP
GRM1886P1H5R7DZ01D
Murata Electronics
CAP CER 5.7PF 50V P2H 0603
CM3421Y600R-10
Laird-Signal Integrity Products
CMC 15A 2LN 60 OHM SMD -

BFCN-1152+
Mini-Circuits
LTCC BAND PASS FILTER, 11160 - 1
SIR422DP-T1-GE3
Vishay Siliconix
MOSFET N-CH 40V 40A PPAK SO-8
MAX3082CSA+TG068
Analog Devices Inc./Maxim Integrated
INTEGRATED CIRCUIT
SZNUP1301ML3T1G
onsemi
TVS DIODE SOT23-3
GRM0225C1E6R0WDAEL
Murata Electronics
CAP CER 6PF 25V C0G/NP0 01005
CY28442ZXC-2
Skyworks Solutions Inc.
IC CLOCK ALVISO PENTM 56TSSOP
MAX6315US30D3-T
Analog Devices Inc./Maxim Integrated
IC SUPERVISOR 1 CHANNEL SOT143-4
TMS320LBC53SPZ80
Texas Instruments
IC DSP 100LQFP
TPS22976DPUR
Texas Instruments
IC PWR SWITCH N-CHAN 1:1 14WSON
SP312AET-L
MaxLinear, Inc.
IC TRANSCEIVER FULL 2/2 18SOIC
ADG444BRZ
Analog Devices Inc.
IC SWITCH SPST-NCX4 70OHM 16SOIC
DM74ALS00AN
Fairchild Semiconductor
IC GATE NAND 4CH 2-INP 14DIP
TCA0372BDWR2G
onsemi
IC POWER 2 CIRCUIT 16SOIC
GCM21A7U2E681JX01D
Murata Electronics
CAP CER 680PF 250V U2J 0805
LQP03HQR30H02D
Murata Electronics
EMC
MCP101-315HI/TO
Microchip Technology
IC SUPERVISOR 1 CHANNEL TO92-3
TPS62153RGTT
Texas Instruments
IC REG BUCK 5V 1A 16QFN
HCPL-7520-560E
Broadcom Limited
IC CURR SENSE 1 CIRCUIT 8DIPGW -

MP6922DS-LF-Z
Monolithic Power Systems Inc.
IC SECONDARY SIDE CTRLR 8SOIC
MP240D4
Opto 22
MP MODEL, 240 VAC, 4 AMP, DC CON
MAX966EUA
Analog Devices Inc./Maxim Integrated
IC COMPARATOR 2 GEN PUR 8UMAX
PIC18F25K20T-I/SO
Microchip Technology
IC MCU 8BIT 32KB FLASH 28SOIC
MAX3238EIDBR
Texas Instruments
IC TRANSCEIVER FULL 5/3 28SSOP
PMEG4020ER,115
Nexperia USA Inc.
DIODE SCHOTTKY 40V 2A SOD123W
TPS62240DDCRG4
Texas Instruments
IC REG BUCK ADJ 300MA SOT23-5
AT45DB161E-SHF2B-T
Adesto Technologies
IC FLASH 16MBIT SPI 85MHZ 8SOIC
FIN1048MTCX
onsemi
IC RECEIVER 0/4 16TSSOP
1N4739A
Microchip Technology
VOLTAGE REGULATOR
MC860ENCZQ50D4R2
NXP USA Inc.
IC MPU MPC8XX 50MHZ 357BGA
ACH32C-222-T001
TDK Corporation
FILTER LC(T) 2200PF SMD
MC7808CTG
onsemi
IC REG LINEAR 8V 1A TO220AB
C4532C0G2W683K320KA
TDK Corporation
CAP CER 0.068UF 450V C0G 1812
AAT3171AIWP-T1
Skyworks Solutions Inc.
IC LED DRIVER RGLTR DIM 12TDFN
IHLP5050EZERR10M01
Vishay Dale
FIXED IND 100NH 55A 0.6 MOHM SMD
ST3232EBTR
STMicroelectronics
IC TRANSCEIVER FULL 2/2 16TSSOP
GRM155R71H332JA01D
Murata Electronics
CAP CER 3300PF 50V X7R 0402