TB6600 stegmotorstyrenhet: pinout, arduino gränssnitt och hur det fungerar
Katalog
Översikt över TB6600 Stepper Motor Driver Module
De TB6600 Stepper Motor Driver-modul är en enhet som kännetecknas av dess motståndskraft och anpassningsförmåga för att kontrollera 2-fas stegmotorer.Den ansluter sömlöst till ett brett utbud av mikrokontroller, mestadels Arduino, vilket främjar skapandet av exakta 5V digitala pulsutgångar.Dessa utgångar är dynamiska för att upprätthålla den känsliga balansen mellan motorisk kontroll.Det är ett mångsidigt val för olika motordrivna projekt att fungera inom ett spänningsområde på 9-42V DC och stödja en toppström på 4 ampere.Denna anpassningsförmåga gör att du effektivt kan hantera motorisk positionering och hastighet, vilket är mycket fördelaktigt i applikationer som syftar till att minimera kodningskomplexiteten.Modulens högfrekventa optokopplare-isolering förbättrar dess tillförlitlighet avsevärt genom att minska störningsrisker och säkerställa en stadig drift.
Harmonin med många mikrokontroller gör TB6600 -föraren till ett passande val för projekt som kräver intrikat motorstyrning.Den integreras smidigt med plattformar som Arduino, vilket återspeglar dess förmåga att möta olika förväntningar.Att använda denna drivrutin i CNC -maskiner eller 3D -skrivare möjliggör till exempel exakt och kontrollerad rörelse, vilket illustrerar dess användbarhet inom olika områden.
Denna modul sticker ut tack vare sitt stöd för både 2-fas och 4-fas stammotorer samt hybridkonfigurationer.Den bipolära H-Bridge-designen är integrerad i att effektivt hantera spänning och ström, vilket säkerställer att föraren levererar toppprestanda över sina applikationer.I miljöer där precision och tillförlitlighet prioriteras, såsom automatiserade produktionslinjer och robotik, är dessa funktioner mycket värderade.
Drag
|
Särdrag |
Beskrivning |
|
Drivartyp |
Bipolär H-bron DC-förare |
|
Utgångsströmalternativ |
8 typer (0,5A till 3,5A), valbara upp till 4 ampere |
|
Underavdelningslägen |
Dela upp till 32, valbara i 6 lägen |
|
Mikrostegalternativ |
8 slag (1, 2/a, 2/b, 4, 8, 16, 32) |
|
Insignalisolering |
Höghastighetsfotoelektrisk separering |
|
Gränssnitt |
Full Standard Single Pulse -gränssnitt |
|
Offline hållfunktion |
Ja |
|
Miljöanvändning |
Halvskruvad kropp för hårda miljöer |
|
Kraftlåsfunktion |
Halvautomatisk, energibesparande |
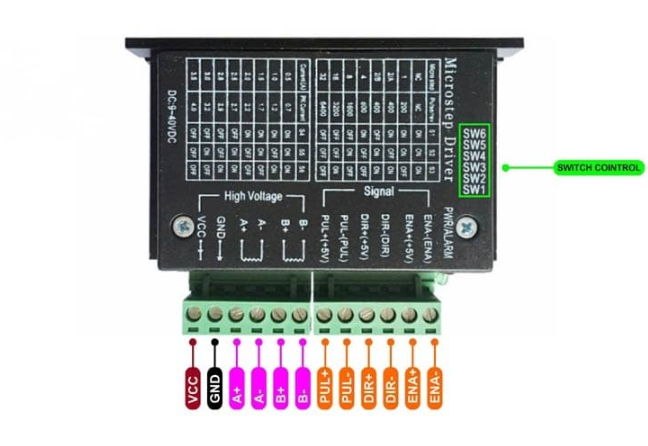
Stiftkonfiguration
Tekniska specifikationer
|
Specifikation |
Information |
|
Driftspänning |
9-40V DC |
|
Framström |
0,7A-4.0A (valbar i 8 steg via DIP-switchar) |
|
Ingångspulsfrekvens |
Upp till 20 kHz |
|
Insignalnivåer |
5V signalnivåer |
|
Puls per revolution |
200-6400 |
|
Logisk signalström |
8A-15A |
|
Motorkompatibilitet |
Lämplig för 2-fas och 4-fas stegmotorer |
|
Skyddsfunktioner |
Överströms, överhettad skydd |
|
Inmatningsisolering |
Optiskt isolerad |
|
Isoleringsmotstånd |
500 megohms |
|
Stödt läge |
Pul/gran -läge |
|
Kosta |
Låg kostnad |
H-Bridge Circuit-konfiguration för TB6600
TB6600 Stepper Motor Driver-modulen är en allvarlig komponent utformad för att styra både 2-fas och 4-fas stegmotorer, med en Bi-polär H-bridkonfiguration för effektiv drift.Denna konfiguration använder MOSFET -transistorer för att säkerställa hög prestanda när det gäller aktuell hantering och termisk stabilitet.Modulen fungerar genom att interagera med två primära styrstift: Stegstiftet, som utlöser motor som går med varje puls, och riktningsstiftet, som bestämmer motorns rotationsriktning baserat på den applicerad spänning.Tillsammans möjliggör dessa ingångar exakt kontroll över motorns stegsekvens och rotationsriktning.
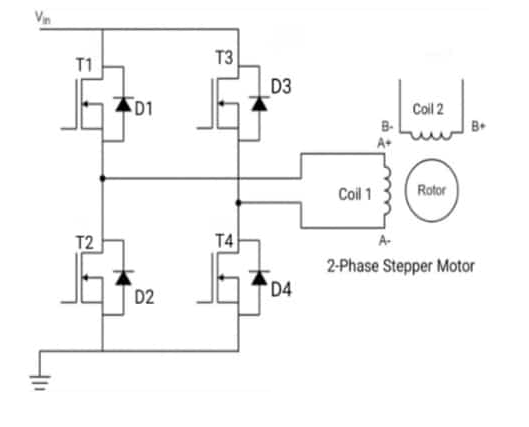
Kretsdiagrammet belyser fyra viktiga transistorer, T1, T2, T3 och T4, arrangerade i en H-brostruktur.Dessa MOSFET: er är ryggraden i modulens operation, vilket möjliggör det dubbelriktade strömflödet som behövs för att driva stegmotorn.Dessutom inkluderar diagrammet flyback -dioder (D1, D2, D3 och D4), som är nyckeln för att skydda kretsen från spänningsspikar orsakade av den induktiva belastningen på motorn.Dessa dioder förhindrar överström och skador på känsliga komponenter under drift.A+, A-, B+och B-terminalerna används för att ansluta motorn, vilket säkerställer korrekt och kontrollerad rörelse av motoraxeln.
Hur H-Bridge möjliggör motorrotation?
TB6600-föraren fungerar genom den samordnade verkan av MOSFET-transistorerna i H-bron.Till exempel:
• Medsols rotation inträffar när transistorer T1 och T4 aktiveras, vilket leder strömflödet från A+ till A-.
• Rotation moturs sker när T2 och T3 är engagerade och vänder strömflödet från A- till A+.
Denna växlande aktivering av transistorer säkerställer smidig dubbelriktad rörelse.För att uppnå optimal vridmoment och effektiv drift är exakt tidpunkt och spänningsreglering väsentliga.
Driftsmetoder för mångsidig kontroll
TB6600 stöder fyra distinkta driftslägen, var och en utformad för att balansera vridmoment, precision och stegstorlek, beroende på applikationskraven:
• Vågläge: I det här läget är bara en spole aktiverad åt gången.Aktivering av en enda spole roterar motorn med 90 grader i en riktning medan den strömmen roterar den i motsatt riktning.Genom att växla mellan spolar uppnår motoren kontinuerlig drift.Detta läge är enkelt men ger mindre vridmoment jämfört med andra lägen.
• Fullstegsläge: Båda spolarna aktiveras samtidigt i detta läge och genererar ett starkare magnetfält.Detta resulterar i ökat vridmoment, vilket gör det idealiskt för applikationer som kräver mer kraft och stabilitet.
• Halvstegsläge: En kombination av vågläge och fullstegsläge, detta läge växlar mellan att aktivera en enda spole och båda spolarna.Det minskar effektivt stegstorleken till 45 grader, vilket ger en balans mellan precision och vridmoment.Vridmomentet kan emellertid variera beroende på om en eller båda spolarna är energiska under ett visst steg.
• Microstep -läge : Det mest exakta av alla lägen, mikrostep -läge minskar stegstorleken ytterligare genom att noggrant modulera strömmen genom motorfaserna.Detta uppnås med avancerade kretsar för att skapa smidiga och gradvisa övergångar mellan steg.Detta läge är idealiskt för applikationer som kräver hög precision och konsekvent vridmoment, såsom CNC -maskiner eller robotik.
Integrering av TB6600 med Arduino Uno
Effektiv kontroll av stegmotorer kräver en kombination av tillförlitlig hårdvara och noggrant programmerad programvara.TB6600 Steg Motor Driver sticker ut som ett utmärkt verktyg för att använda 2-fas stegmotorer.Det stöder flera operativa lägen, såsom våg, fullsteg, halvsteg och mikro-steg.Dess inbyggda skyddsfunktioner-inklusive skyddsåtgärder mot lågspänning, överström och överhettning-gör det ett fast val för projekt som kräver precision och hållbarhet.
För att ställa in TB6600 med en Arduino UNO, samla följande komponenter:
• Arduino Uno R3
• TB6600 Steg Motor Driver (4A version)
• Stegmotor (med ett rekommenderat betyg på 1,65A)
• Tillförlitlig strömförsörjning (t.ex. ett batteri eller reglerad likströmskälla)
• Jumpertrådar
• Arduino IDE installerad på din dator
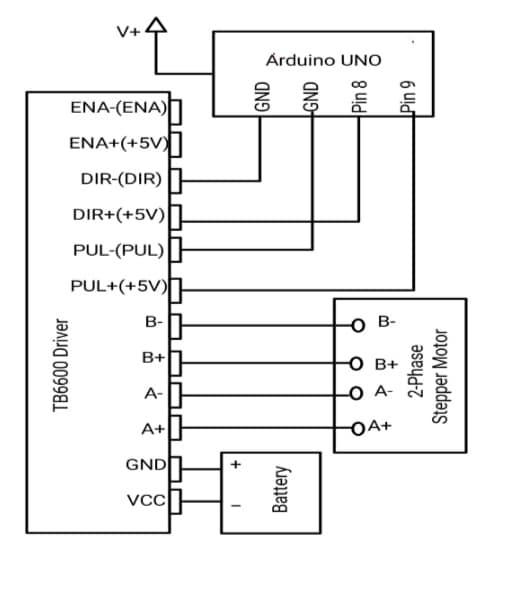
Följ dessa detaljerade instruktioner för att integrera TB6600 med Arduino
Anslut riktning och pulssignaler
• Länk DIR+ och PUL+ terminalerna på TB6600 till Arduino Pins 8 respektive 9.Dessa stift skickar riktning och pulssignaler.
• Fäst rikt- och pulterminalerna på marken (GND) på Arduino.
• Anslut motorn till TB6600: Fäst stegmotorns ledningar på TB6600 -terminalerna.
• A+ och A- för en spole av motorn.
• B+ och B- för den andra spolen.
• Ström TB6600 -drivrutinen: Anslut VCC- och GND -stiften på TB6600 till din strömförsörjning.Se till att spänningen matchar din motor och förarens krav för att undvika skador.
Justera mikrostepupplösning
TB6600 låter dig finjustera stegmotorns rörelseprecision med SW1- och SW2-switcharna.Justera dessa switchar enligt följande:
• ¼ Stegupplösning: Ställ in SW1 och SW2.
• ⅛ Stegupplösning: Ställ in SW1 och SW2 på.
• 1/32 Stegupplösning: Ställ in både SW1 och SW2.
• Fullstegsläge: Ställ in både SW1 och SW2.
Sanningstabell
|
SW2 |
Mikrostepupplösning |
|
AV |
1/32 steg |
|
PÅ |
1/8 steg |
|
AV |
1/4 steg |
|
PÅ |
Hela steget |
Växeljusteringar gör att du kan optimera balansen mellan precision och hastighet baserat på projektets behov.
För att säkerställa att din motor fungerar inom säkra strömgränser har TB6600 ytterligare switchar (SW4 och SW6) för att justera strömflödet.Dessa inställningar är användbara för:
• Förhindra överbelastningsskador.
• Håll konsekvent motorisk prestanda.
• Kontrollera alltid att motorströmmen förblir under förarens maximum 4A för att skydda båda komponenterna.
• Kontrollmotorns riktning: Om du vill att motorn ska rotera moturs, ändra tillståndet för DIR+ PIN -stiftet i din Arduino -kod.
• Testning och felsökning: När du har slutfört installationen laddar du upp en grundläggande stegmotorstyrskiss för att verifiera lednings- och förarfunktionaliteten.
• Undvik överhettning: Se till att korrekt ventilation för TB6600-drivrutinen, särskilt i högströmmapplikationer.
Ansökningar
TB6600 -modulen spelar en aktiv roll i många sektorer där noggrann motorstyrning används.Dess anpassningsförmåga lyser igenom i olika implementeringar som belyser dess unika kapacitet:
Antennpositionering
Inom telekommunikation är det obligatoriskt att uppnå optimal antennjustering för kvalitetssignalmottagning och överföring.TB6600 underlättar precisionsrörelsen och förbättrar därmed effektiviteten hos kommunikationssystem.
Stegmotorhantering
Inom automatisering och robotik uppnås exakt stegmotorhantering genom TB6600, så att du kan förfina rörelseprecision och stärka systemets tillförlitlighet.
CNC -verksamhet
För CNC -maskiner för numerisk kontroll (CNC) förbättrar TB6600 intrikata skär- och fräsningsprocesser, vilket gör att du kan upprätthålla höga nivåer av noggrannhet och repeterbar precision i deras arbete.
3D -tryckprecision
Vid tillsatsstillverkning, särskilt 3D -utskrift, erbjuder TB6600 detaljerad motorstyrning, vilket stödjer en exakt positionering av tryckhuvuden som krävs för att skapa komplexa former och former.
Komplex motorisk kontroll
Modulen är värdefull för komplicerade motorstyrningsuppgifter inom komplexa automatiseringssystem, förbättrar effektiviteten och möjliggör förfinad hantering.
Kontroll av hastighet, position och rotation
TB6600 utmärker sig i scenarier som kräver exakt hastighet och rotationskontroll, mestadels för att optimera prestanda i ständigt föränderliga miljöer.
Avbildningsanordningar och banksystem
Modulen stöder tillförlitlig drift av kameror och bankomater genom att säkerställa smidiga, exakta motoriska rörelser, som förlänger enheternas operativa livslängd.
Precision i graveringsenheter
För graveringsverktyg och maskiner ger TB6600 den exakta kontrollen som krävs för att utföra fint detaljerade mönster, en farlig faktor i branscher där precision och detaljer är dominerande.
Om oss
ALLELCO LIMITED
Läs mer
Snabb förfrågan
Skicka en förfrågan, vi svarar omedelbart.
Vanliga frågor [FAQ]
1. Vilken strömförsörjning ska jag använda för TB6600 -drivrutinen?
TB6600 stegmotordrivrutin arbetar med en strömförsörjningsspänning mellan 8V och 45V.
2. Hur kan jag styra steghastigheten med TB6600?
TB6600 använder pulsbreddmodulering (PWM) för att justera motorhastigheten.Du kan ändra hastigheten genom att modifiera PWM -frekvensen.
3. Kan TB6600 stödja högströms stegmotorer?
Ja, TB6600 kan hantera upp till 4,5A, vilket gör det kompatibelt med stegmotorer som är rankade upp till denna ström.
4. Hur vänder jag motorriktningen med TB6600?
För att vända motorriktningen, växla ingångssignsekvensen på styrstiften (t.ex. in1-in2-in3-in4 för framåt, in4-in3-in2-in1 för omvänd).
5. Kan jag ansluta en stegmotor med mer än fyra ledningar till TB6600?
TB6600 är gjord för 4-tråds stegmotorer.Om din motor har mer än fyra ledningar behöver du en annan förare.
6. Är TB6600 kompatibel med en NEMA23 -stegmotor?
TB6600 fungerar bra med NEMA17 -motorer men är i allmänhet olämplig för NEMA23 -motorer på grund av deras högre nuvarande krav.

En komplett guide till E18-D80NK justerbar IR-sensor
på 2024/12/12
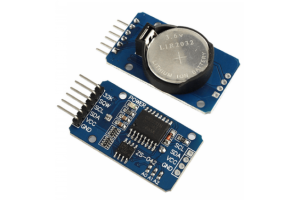
DS3231 RTC -modulen förklarad: PIN -diagram, specifikationer och mikrokontrollergränssnitt
på 2024/12/12
Populära inlägg
-

Komplexa instruktionsuppsättningsdatorer: Hur de ändrade datoranvändning?
på 8000/04/18 147757
-

USB-C-pinout och funktioner
på 2000/04/18 111936
-

Använda Xilinx Unified Simulation Primitives: En omfattande guide till FPGA -design och simulering
på 1600/04/18 111349
-

Strömförsörjningsspänningar i elektronik: Betydelsen av VCC, VDD, VEE, VSS och GND
på 0400/04/18 83721
-

RJ45 -anslutningsguide: Pinout, ledningar, kabeltyper och användningar
på 1970/01/1 79508
-

Den ultimata guiden för trådfärgkoder i moderna elektriska system
Hur våra elektriska system använder färger är inte bara för utseende.Varje trådfärg indikerar nu en specifik funktion, vilket gör det lättare att identifiera och hantera elektriska komponenter korr...på 1970/01/1 66912
-

Purge Valve Guide: Funktion, symtom, testning och ersättning för optimal motorprestanda
Purge -ventilen är en viktig del av bilens system som hjälper till att hålla luften ren genom att hantera bränsleångor innan de kan fly in i atmosfären.Detta hjälper inte bara miljön genom att mins...på 1970/01/1 63048
-

Kvalitet (Q) Faktor: Ekvationer och applikationer
Kvalitetsfaktorn, eller 'Q', är viktig när man kontrollerar hur väl induktorer och resonatorer arbetar i elektroniska system som använder radiofrekvenser (RF).'Q' mäter hur väl en krets minimerar e...på 1970/01/1 63012
-

Uppnå toppprestanda med den maximala kraftöverföringssatsen
Den maximala kraftöverföringssatsen förklarar hur energi från en källa, till exempel ett batteri eller generator, flyter till en ansluten belastning.Det visar det exakta tillståndet där lasten får ...på 1970/01/1 54081
-

A23 -batterispecifikationer och kompatibilitet
A23-batteriet är ett litet, cylinderformat batteri med högspänning.Även kallad 23A, 23AE eller MN21, den körs vid 12 volt och mycket högre än AA- eller AAA -batterier.Dess speciella design...på 1970/01/1 52129
Hett artikelnummer
-

LT8619IMSE#PBF
Analog Devices Inc.
IC REG BUCK 0.8V 1.2A 16MSOP
SN54LS173AJ
Texas Instruments
54LS173A 4-BIT D-TYPE REGISTERS
74AC109SC
Fairchild Semiconductor
IC FF JK TYPE DUAL 1BIT 16SOIC
V375C12E150BG
Vicor Corporation
DC DC CONVERTER 12V 150W
ADM8830ACP
Analog Devices Inc.
IC CHARGE PUMP REG TFT 20LFCSP
Z8F021APJ020SG
Zilog
IC MCU 8BIT 2KB FLASH 28DIP
SPC58EC80E1Q0C0X
STMicroelectronics
IC MCU 32BIT 4MB FLASH 64ETQFP
VE-2N2-CW
Vicor Corporation
DC DC CONVERTER 15V 100W
NZT902
onsemi
TRANS NPN 90V 3A SOT223-4
EDZVFHT2R16B
Rohm Semiconductor
DIODE ZENER 16V 150MW EMD2
ATMEGA329PV-10ANR
Atmel
IC MCU 8BIT 32KB FLASH 64TQFP
MM74HCT08MTCX
Fairchild Semiconductor
AND GATE, HCT SERIES, 4-FUNC, 2-
UC3853D
Texas Instruments
IC PFC CTR AVER CURR 94KHZ 8SOIC
MT46V8M16TG-75:D
Micron Technology Inc.
IC DRAM 128MBIT PARALLEL 66TSOP
DRV5015A1QDBZT
Texas Instruments
MAGNETIC SWITCH LATCH SOT23-3
TPS7A2430DBVR
Texas Instruments
IC REG LINEAR 3V 200MA SOT23-5
10118242-001RLF
Amphenol ICC (FCI)
CONN RCP MICRO HDMI 19POS SMD RA
NUF6402MNT1G
onsemi
FILTER RC(PI) 100 OHM/17PF SMD -

MAX923CPA+
Analog Devices Inc./Maxim Integrated
IC COMPARATOR 2 W/VOLT REF 8DIP
SL28506BZC-2
Skyworks Solutions Inc.
IC CLOCK CK505 PCIE GEN2 56TSSOP
LT1678CS8#TRPBF
Analog Devices Inc.
IC OPAMP GP 2 CIRCUIT 8SO
RHRG5060
NXP USA Inc.
RECTIFIER DIODE, AVALANCHE, 1 PH
TLC3704CN
Texas Instruments
IC COMPARATOR 4 GEN PUR 14DIP
W1524LC300
IXYS
DIODE GEN PURP 3KV 1524A W4
TPS2041BDBVR
Texas Instruments
IC PWR SWITCH N-CHAN 1:1 SOT23-5
VI-250-EY
Vicor Corporation
DC DC CONVERTER 5V 50W
RMPA0959
Fairchild Semiconductor
IC RF AMP CELL 824-849MHZ 11LCC
SMCJ16CA-E3/57T
Vishay General Semiconductor - Diodes Division
TVS DIODE 16VWM 26VC DO214AB
SN74CBT3125PWR
Texas Instruments
IC BUS SWITCH 1 X 1:1 14TSSOP
ACT412US-T
Active-Semi
IC OFF-LINE SWITCH PWM 6SOT-23
VNB14NV0413TR
STMicroelectronics
IC PWR DRIVER N-CHAN 1:1 D2PAK
C1608X7R2A102M/10
TDK Corporation
CAP CER 1000PF 100V X7R 0603
C2012JB1A685K085AC
TDK Corporation
CAP CER 6.8UF 10V JB 0805
EPM3128ATC100-5
Intel
IC CPLD 128MC 5NS 100TQFP
LTC2950ITS8-2#TRMPBF
Analog Devices Inc.
IC PB ON/OFF CONTROLLER TSOT23-8
BLM21BB221SN1D
Murata Electronics
FERRITE BEAD 220 OHM 0805 1LN -

THS6226AIRHBT
Texas Instruments
IC TELECOM INTERFACE 32VQFN
LV8481CS-TE-L-H
onsemi
IC MTR DRVR BIPLR 2.4-4.5V 10WLP
SSF2300
Good-Ark Semiconductor
MOSFET, N-CH, SINGLE, 4.5A, 20V,
CYPD2134-24LQXI
Infineon Technologies
IC MCU 32BIT 32KB FLASH 24QFN
SBR20A100CT
Diodes Incorporated
DIODE ARRAY SBR 100V 10A TO220AB
93LC46B-I/MS
Microchip Technology
IC EEPROM 1KBIT MICROWIRE 8MSOP
74HCT1G14GV,125
Nexperia USA Inc.
IC INVERT SCHMITT 1CH 1-IN SC74A
L78M09CDT-TR
STMicroelectronics
IC REG LINEAR 9V 500MA DPAK
HRPG-ASCA#13R
Broadcom Limited
ROTARY ENCODER OPTICAL 120PPR
IRFR9220TRPBF
Vishay Siliconix
MOSFET P-CH 200V 3.6A DPAK
ISL81487LIB
Intersil
IC TRANSCEIVER HALF 1/1 8SOIC
UPD78F0511AGB-GAF-AX
Renesas Electronics America Inc
IC MCU 8BIT 16KB FLASH 44LQFP
PCM1737E/2K
Texas Instruments
IC DAC/AUDIO 24BIT 200K 28SSOP
V24B15H200BG3
Vicor Corporation
DC DC CONVERTER 15V 200W
AB-13.560MANH-T
TXC CORPORATION
CRYSTAL 13.5600MHZ 15PF SMD
XC6220B281PR-G
Torex Semiconductor Ltd
IC REG LINEAR 2.8V 1A SOT89-5
KSZ9131RNXC
Microchip Technology
IC TXRX FULL/HALF 4/4 48QFN
12062C223MAT2A
KYOCERA AVX
CAP CER 0.022UF 200V X7R 1206