正在等待翻译……
När du arbetar med PCB-design kommer du ofta att välja mellan en FPGA och en mikrokontroller utifrån dina systembehov.Den här artikeln förklarar vad var och en är, hur de fungerar och nyckelkomponenterna i dem.Du kommer också att se hur deras systemstrukturer och programmeringssätt skiljer sig åt.Genom att förstå dessa grunder kan du bestämma vilken som passar ditt projekt bättre.Katalog
Figur 1. Översikt över FPGA vs mikrokontroller
Vad är en FPGA och en mikrokontroller?
An FPGA (Field-Programmable Gate Array) är en typ av integrerad krets som låter dig konfigurera digital logik efter tillverkning.Det används ofta i PCB-design när anpassat hårdvarubeteende behövs, till exempel att skapa parallella signalbehandlingsvägar eller specialiserad styrlogik.Istället för att köra programvaruinstruktioner bygger en FPGA hårdvarukretsar baserat på din design.Detta gör den lämplig för uppgifter som kräver exakt timing och flexibilitet på hårdvarunivå.I ett PCB-system fungerar det som en programmerbar logisk kärna som ansluter till minne, sensorer och kommunikationsgränssnitt.Använd FPGA-enheter för att direkt implementera anpassade digitala system på kortet.
A mikrokontroller är en kompakt integrerad krets designad för att exekvera programmerade instruktioner för att styra elektroniska system.Den innehåller vanligtvis en processor, minne och in-/utgångsgränssnitt i ett enda chip, vilket gör den idealisk för inbyggda PCB-applikationer.Mikrokontroller används vanligtvis för att läsa indata, bearbeta data och styra utgångar såsom lysdioder, motorer eller sensorer.De fungerar sekventiellt, efter en uppsättning instruktioner skrivna i programvaran.I PCB-design fungerar de som huvudstyrenhet för många enheter, från enkla prylar till komplexa system.Deras enkelhet och integration gör dem till ett populärt val för kontrollorienterade uppgifter.
Komponenter av FPGA och mikrokontroller
FPGA-komponenter
FPGA består av flera konfigurerbara hårdvaruelement som arbetar tillsammans.
• Logikblock (konfigurerbara logiska block - CLB)
Dessa är kärnbyggnadsenheterna i en FPGA som utför digitala operationer.Varje logikblock innehåller uppslagstabeller (LUT), vippor och multiplexorer.LUT:er används för att implementera kombinationslogikfunktioner genom att lagra sanningstabeller.Flip-flops ger lagring för sekventiell logik och timingkontroll.Tillsammans gör dessa element att FPGA kan bilda anpassade digitala kretsar.
• Programmerbara sammankopplingar
Sammankopplingar är routingvägar som kopplar samman olika logiska block inom FPGA.De tillåter signaler att färdas mellan logiska element baserat på den konfigurerade designen.Dessa anslutningar är flexibla och kan omprogrammeras för att matcha olika kretslayouter.Routingnätverket säkerställer att signalerna når rätt destinationer effektivt.Denna struktur möjliggör komplex kretsskapande utan fasta ledningar.
• In-/utgångsblock (I/O).
I/O-block ansluter FPGA till externa komponenter på PCB:n.De hanterar kommunikation med enheter som sensorer, minne och processorer.Dessa block stöder olika spänningsnivåer och signaleringsstandarder.De kan konfigureras som in-, ut- eller dubbelriktade portar.Denna flexibilitet möjliggör sömlös integration med olika externa system.
• Klockhanteringsenheter
Klockhanteringsenheter styr timing och synkronisering inuti FPGA.De genererar och distribuerar klocksignaler till olika delar av chipet.Dessa enheter kan inkludera faslåsta loopar (PLLs) eller delay-locked loops (DLLs).De hjälper till att upprätthålla en stabil tidpunkt för tillförlitlig drift.Korrekt klockkontroll säkerställer korrekt databehandling över hela designen.
• Inbyggda minnesblock (BRAM)
Dessa är inbyggda minnesenheter som används för tillfällig datalagring.De ger snabb åtkomst till ofta använda data inom FPGA.Block RAM kan konfigureras i olika storlekar och lägen.Det stöder buffring, cachelagring och datahanteringsuppgifter.Detta minskar behovet av externt minne i vissa konstruktioner.
Mikrokontrollerkomponenter
En mikrokontroller integrerar flera funktionella enheter i ett chip.
• Central Processing Unit (CPU)
CPU:n är den huvudsakliga bearbetningsenheten som exekverar instruktioner.Den utför aritmetik, logik och kontrolloperationer.CPU:n läser instruktioner från minnet och bearbetar dem steg för steg.Den hanterar dataflödet i systemet.Detta gör den till mikrokontrollerns kärnkontroller.
• Minne (Flash, RAM, EEPROM)
Mikrokontroller inkluderar olika typer av minne för lagring av kod och data.Flash-minnet lagrar programmet permanent.RAM används för temporär data under körning.EEPROM används för att lagra små mängder icke-flyktiga data.Varje typ spelar en specifik roll i systemets drift.Tillsammans stödjer de tillförlitlig datahantering.
• Timers och räknare
Timers och räknare används för tidsbaserade operationer.De hjälper till att generera förseningar, mäta tidsintervall och kontrollera periodiska uppgifter.Dessa komponenter är viktiga för funktioner som PWM-signalgenerering.De stöder också räkning och schemaläggning av händelser.Detta gör dem användbara i styr- och automationssystem.
• In-/utgångsportar (GPIO)
GPIO-stift gör att mikrokontrollern kan interagera med externa enheter.De kan konfigureras som ingång eller utgång beroende på applikation.Dessa portar läser signaler från sensorer eller skickar signaler till ställdon.De stöder digital kommunikation med andra komponenter.GPIO:er är bra för systemanslutning.
• Kommunikationsgränssnitt
Mikrokontroller inkluderar inbyggda kommunikationsmoduler som UART, SPI och I2C.Dessa gränssnitt tillåter datautbyte med andra enheter.De stöder seriella kommunikationsprotokoll som vanligtvis används i inbyggda system.Detta möjliggör anslutning till sensorer, displayer och andra kontroller.Dessa gränssnitt förenklar systemintegration.
Blockdiagram över FPGA- och mikrokontrollersystem
Dessa diagram hjälper till att visualisera hur varje system ansluter och fungerar internt och externt.
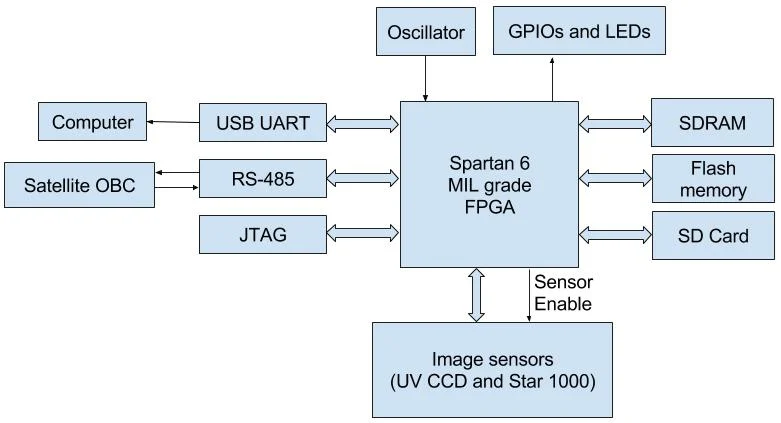
Figur 2. FPGA-blockdiagram
FPGA-blockdiagrammet visar en central programmerbar enhet ansluten till flera externa komponenter via flexibla gränssnitt.Den länkar vanligtvis till minnesmoduler som SDRAM och flashlagring för datahantering.Kommunikationsgränssnitt som UART, RS-485 och JTAG tillåter interaktion med externa system och felsökningsverktyg.Diagrammet inkluderar även in-/utgångsanslutningar för sensorer och styrsignaler.En klockkälla tillhandahåller tidssignaler för att säkerställa synkroniserad drift.Strukturen belyser hur FPGA fungerar som ett centralt logiskt nav i systemet.Den hanterar dataflödet mellan kringutrustning utan fast intern arkitektur.
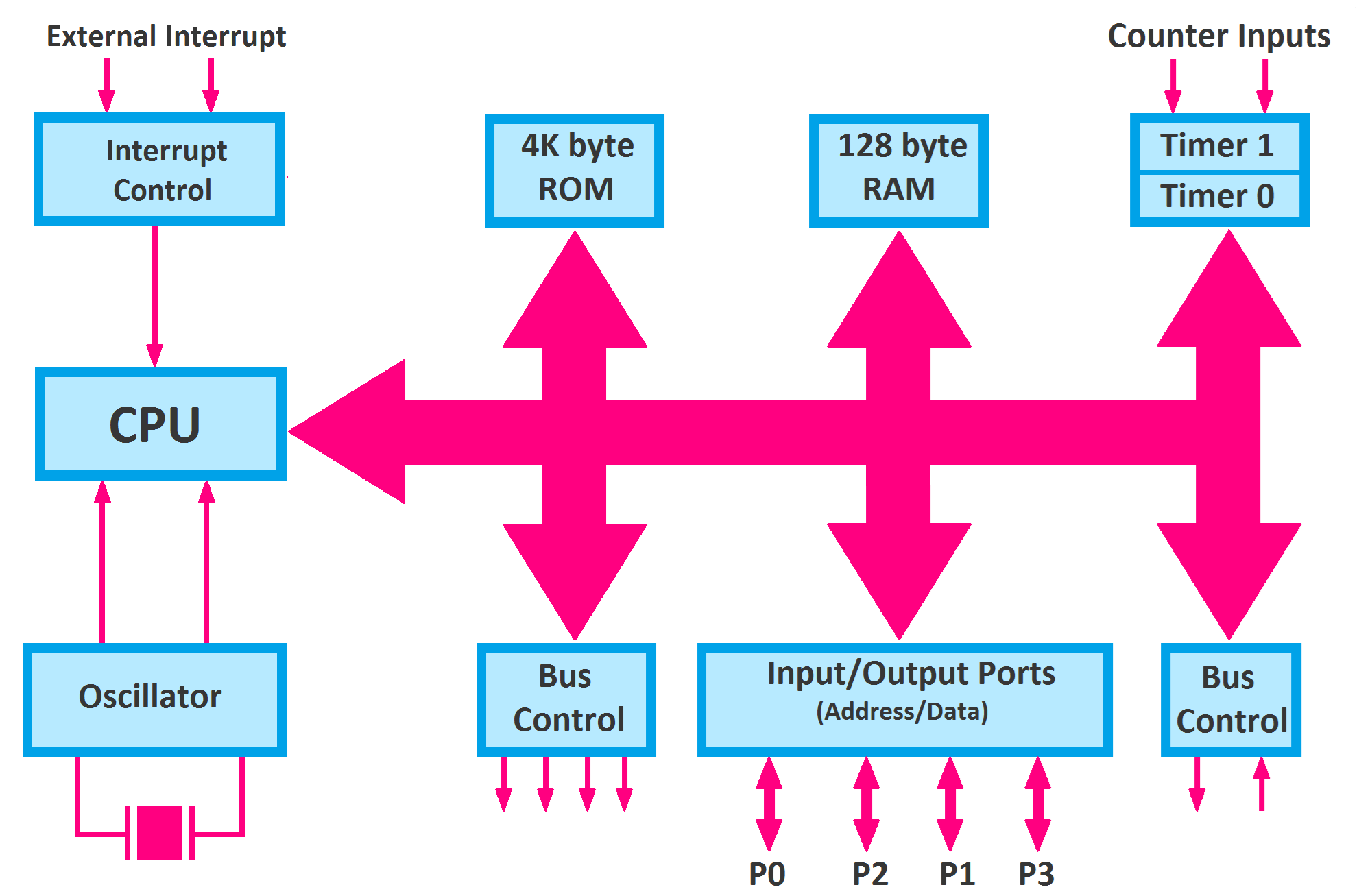
Figur 3. Mikrokontrollerblockdiagram
Mikrokontrollerns blockschema visar en centraliserad processorenhet ansluten till internminne och kringutrustning via ett bussystem.CPU:n kommunicerar med ROM och RAM för att exekvera och lagra instruktioner.In-/utgångsportar tillåter interaktion med externa enheter som sensorer och bildskärmar.Timers och räknare hanterar timingrelaterade operationer inom systemet.En oscillator ger klocksignalen som driver hela operationen.Interrupt control hanterar extern och intern händelsehantering.Denna struktur visar ett kompakt och integrerat system utformat för kontrolluppgifter.
Fördelar och nackdelar med FPGA
|
Fördelar |
Nackdelar |
|
Mycket flexibel
hårdvarukonfiguration tillåter anpassad digital kretsdesign. |
Komplex design
process som kräver hårdvarubeskrivningsspråk. |
|
Stöder sant
parallell bearbetning för höghastighetsoperationer. |
Högre kostnad
jämfört med enklare inbyggda lösningar. |
|
Omprogrammerbar
flera gånger för olika applikationer. |
Längre
utvecklingstid på grund av design och testning. |
|
Kan hantera
komplexa signalbehandlings- och datauppgifter. |
Kräver
specialiserade verktyg och expertis. |
|
Skalbar
arkitektur lämplig för avancerade system. |
Högre effekt
förbrukning i vissa utföranden. |
Fördelar och nackdelar med mikrokontroller
|
Fördelar |
Nackdelar |
|
Låg kostnad och
allmänt tillgänglig för många applikationer. |
Begränsad
processorkraft för komplexa uppgifter. |
|
Lätt att programmera
använder vanliga språk som C/C++. |
Sekventiell
exekvering begränsar parallell bearbetning. |
|
Integrerad
komponenter minskar externa hårdvarubehov. |
Begränsat minne
jämfört med större system. |
|
Låg effekt
förbrukning lämplig för bärbara enheter. |
Mindre flexibel
hårdvarukonfiguration. |
|
Snabb utveckling
cykel för inbyggda system. |
Prestanda
beror på fast arkitektur. |
Kodjämförelse: FPGA vs mikrokontrollerprogrammering
Det här avsnittet visar hur programmeringssätt skiljer sig mellan hårdvaru- och mjukvarudesign.
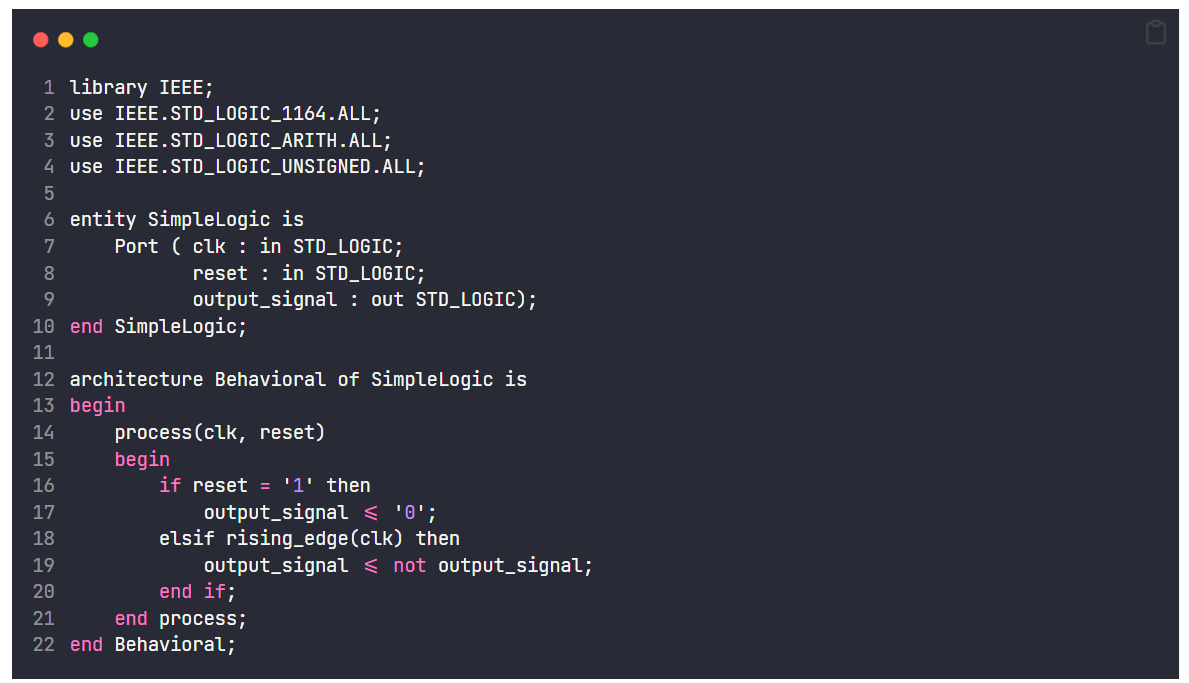
Figur 4. Exempel på FPGA-kod
FPGA-kodexemplet använder ett hårdvarubeskrivningsspråk som VHDL för att definiera kretsens beteende.Istället för att skriva instruktioner beskriver koden hur signaler förändras och interagerar.Den definierar ingångar, utgångar och hur systemet reagerar på klocksignaler.Strukturen inkluderar enheter och arkitekturer för att organisera designen.Ett processblock styr hur signaler uppdateras baserat på händelser som klockkanter.Detta tillvägagångssätt modellerar hårdvarubeteende direkt snarare än att utföra sekventiella kommandon.Det tillåter skapandet av anpassad digital logik inuti FPGA.
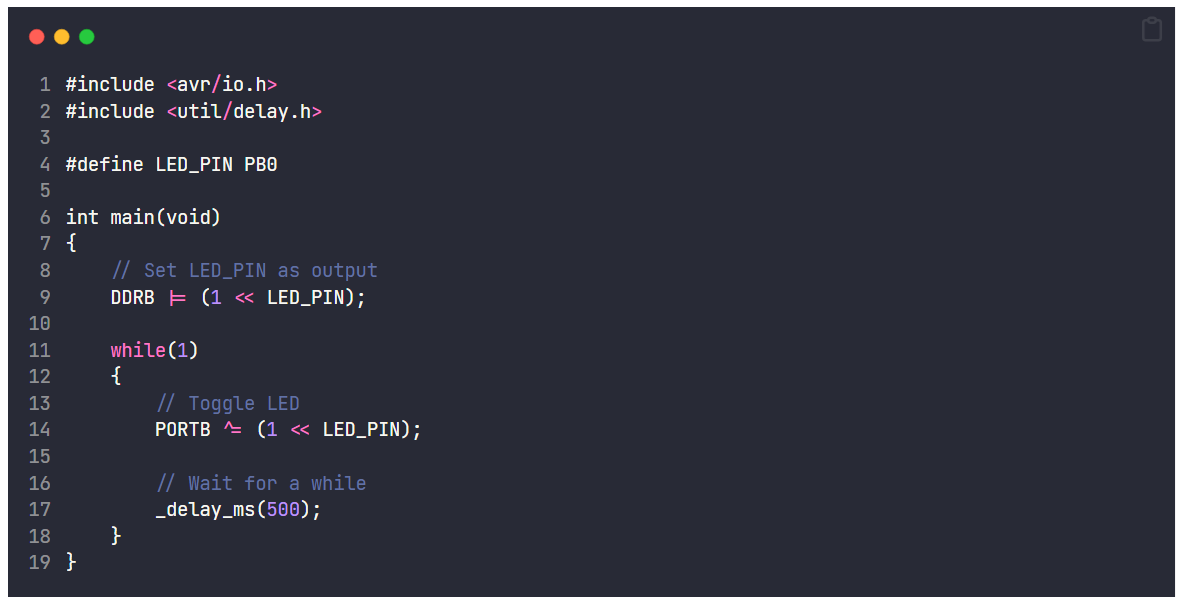
Figur 5. Exempel på mikrokontrollerkod
Mikrokontrollerkodexemplet använder ett programmeringsspråk som C för att exekvera instruktioner steg för steg.Det börjar med att ställa in maskinvaruregister och definiera stiftkonfigurationer.Huvudfunktionen körs kontinuerligt och utför uppgifter i en slinga.Instruktioner styr utgångar som att tända och släcka en lysdiod.Fördröjningsfunktioner används för att skapa timingeffekter.Detta tillvägagångssätt följer en sekventiell exekveringsmodell.Det är enkelt och används ofta för programmering av inbyggda system.
Tillämpningar av FPGA och mikrokontroller
Dessa tekniker används inom många branscher baserat på deras designroller.
1. Industriella automationssystem
FPGA används för styrning och signalbehandling i industriella maskiner.De hanterar höghastighetsdata och exakta tidskrav.Mikrokontroller hanterar sensorer, motorer och styrlogik i automationssystem.Tillsammans möjliggör de pålitlig och effektiv verksamhet.Denna kombination förbättrar systemets prestanda och kontroll.
2. Konsumentelektronik
Mikrokontroller används ofta i enheter som tvättmaskiner, TV-apparater och fjärrkontroller.De hanterar användarinmatningar och systemfunktioner effektivt.FPGA:er används i avancerade enheter som kräver snabb datahantering, såsom videoprocessorer.Dessa applikationer drar nytta av kompakta och effektiva konstruktioner.Båda teknologierna stöder moderna elektroniska produkter.
3. Kommunikationssystem
FPGA:er används i nätverksutrustning för datarouting och signalbehandling.De stöder höghastighetskommunikationsprotokoll.Mikrokontroller hanterar kontroll- och övervakningsfunktioner i kommunikationsenheter.Dessa roller säkerställer stabil och effektiv dataöverföring.Detta är viktigt i modern kommunikationsinfrastruktur.
4. Medicinsk utrustning
Mikrokontroller styr funktioner i enheter som hjärtmonitorer och infusionspumpar.De säkerställer tillförlitlig och låg effekt drift.FPGA:er används i bildbehandlingssystem för snabb databehandling.Dessa applikationer kräver noggrannhet och tillförlitlighet.Båda teknologierna stödjer sjukvårdssystemen.
5. Bilsystem
Mikrokontroller hanterar motorstyrenheter, sensorer och säkerhetssystem.De säkerställer effektiv fordonsdrift.FPGA:er används i avancerade förarassistanssystem för databehandling.Dessa system förbättrar säkerhet och prestanda.Bilelektronik är starkt beroende av båda teknikerna.
6. Flyg och försvar
FPGA:er används för höghastighetsdatabehandling och säkra kommunikationssystem.De stöder komplexa signalanalys- och kontrolluppgifter.Mikrokontroller hanterar övervaknings- och kontrollfunktioner i inbyggda system.Dessa applikationer kräver hög tillförlitlighet och precision.Båda teknologierna spelar nyckelroller i verksamhetskritiska system.
FPGA vs mikrokontroller vs CPLD
Den här tabellen belyser viktiga skillnader mellan viktiga tekniska aspekter.
|
Funktioner |
FPGA |
Mikrokontroller |
CPLD |
|
Logiska resurser |
~10K till >10M
logiska grindar (eller LUT) |
Ej tillämpligt
(CPU-baserad) |
~1K till ~100K
portar |
|
Klockhastighet |
~50 MHz till 500+
MHz (designberoende) |
~1 MHz till 600
MHz (typiska MCU:er) |
~50 MHz till 200
MHz |
|
Bearbetningsstil |
Riktig parallell
hårdvaruutförande |
Sekventiell
instruktionsutförande |
Begränsad parallell
logik |
|
Konfiguration
Metod |
SRAM/Flash-baserad
bitström laddas vid start |
Firmware lagrad
i flashminnet |
Icke-flyktig
konfiguration (EEPROM/Flash) |
|
Programmering
Språk |
VHDL, Verilog
(HDL) |
C, C++, montering |
VHDL, Verilog |
|
Internminne |
Blockera RAM: ~10
KB till flera MB |
Flash: ~8 KB–2
MB, RAM: ~2 KB–512 KB |
Mycket begränsad
(motsvarande få KB) |
|
I/O-stift |
~50 till 1000+
konfigurerbara I/O |
~6 till 200 GPIO
stift |
~30 till 500 I/O |
|
Kraft
Konsumtion |
~1 W till 10+ W
(beror på storlek/design) |
~1 mW till 500 mW |
~10 mW till 1 W |
|
Starttid |
ms till sekunder
(behöver konfigurationsladdning) |
µs till ms
(omedelbart från Flash) |
Omedelbar
(icke-flyktig) |
|
Design Entry |
Hårdvarukrets
definition |
Programvara
utveckling |
Logisk design
(enklare än FPGA) |
|
Externt
Komponenter |
Kräver ofta
externt minne (DDR, Flash) |
Minimal (vanligtvis
fristående) |
Minimal extern
komponenter |
|
Omkonfigurering |
Fullständigt
omprogrammerbara, obegränsade cykler |
Omprogrammerbar
firmware |
Omprogrammerbar
men begränsad storlek |
|
Typisk användning
Skala |
Hög komplexitet
digitala system |
Liten till medelstor
inbyggda system |
Liten kontroll
och gränssnittslogik |
|
Utveckling
Cykla |
Veckor till månader |
Dagar till veckor |
Dagar till veckor |
Slutsats
FPGA:er och mikrokontroller skiljer sig huvudsakligen åt i hur de behandlar data, med FPGA:er som erbjuder parallell hårdvarubaserad exekvering och mikrokontroller som förlitar sig på sekventiell mjukvarukontroll.Deras interna komponenter, systemstrukturer och programmeringsmetoder återspeglar dessa skillnader, vilket gör var och en lämplig för specifika tillämpningar.FPGA:er utmärker sig i höghastighets, anpassningsbara logiska uppgifter, medan mikrokontroller är idealiska för kontrollorienterade och kostnadseffektiva konstruktioner.Tillsammans spelar de viktiga roller inom branscher som automation, kommunikation, fordon och sjukvårdssystem.
Om oss
ALLELCO LIMITED
Läs mer
Snabb förfrågan
Skicka en förfrågan, vi svarar omedelbart.
Vanliga frågor [FAQ]
1. Kan en FPGA ersätta en mikrokontroller i en PCB-design?
Ja, men det beror på applikationen.En FPGA kan replikera kontrollfunktioner, men den är ofta mer komplex och kostsam jämfört med en mikrokontroller för enkla uppgifter.
2. Varför är mikrokontroller mer energieffektiva än FPGA?
Mikrokontroller är optimerade för lågeffektdrift med integrerade komponenter och vilolägen.FPGA:er förbrukar mer ström tack vare konfigurerbar logik och parallell bearbetning.
3. Kräver FPGA ett operativsystem som mikrokontroller?
Nej, FPGA:er kräver inget operativsystem eftersom de implementerar hårdvarulogik direkt.Mikrokontroller kan köras utan OS men kan använda ett för komplexa applikationer.
4. Kan du använda både FPGA och mikrokontroller i ett system?
Ja, många system kombinerar båda.FPGA hanterar höghastighetsbehandling, medan mikrokontrollern hanterar kontroll- och kommunikationsuppgifter.
5. Vilka programmeringsspråk används för utveckling av FPGA och mikrokontroller?
FPGA:er använder hårdvarubeskrivningsspråk som VHDL eller Verilog, medan mikrokontroller vanligtvis programmeras med C eller C++.
Komplett guide till optokopplare för nybörjare
på 2026/03/30
Fästmetoder för kylfläns för PCB och urvalsguide
på 2026/03/27
Populära inlägg
-

Komplexa instruktionsuppsättningsdatorer: Hur de ändrade datoranvändning?
på 8000/04/18 147772
-

USB-C-pinout och funktioner
på 2000/04/18 112009
-

Använda Xilinx Unified Simulation Primitives: En omfattande guide till FPGA -design och simulering
på 1600/04/18 111351
-

Strömförsörjningsspänningar i elektronik: Betydelsen av VCC, VDD, VEE, VSS och GND
på 0400/04/18 83768
-

RJ45 -anslutningsguide: Pinout, ledningar, kabeltyper och användningar
på 1970/01/1 79565
-

Den ultimata guiden för trådfärgkoder i moderna elektriska system
Hur våra elektriska system använder färger är inte bara för utseende.Varje trådfärg indikerar nu en specifik funktion, vilket gör det lättare att identifiera och hantera elektriska komponenter korr...på 1970/01/1 66960
-

Purge Valve Guide: Funktion, symtom, testning och ersättning för optimal motorprestanda
Purge -ventilen är en viktig del av bilens system som hjälper till att hålla luften ren genom att hantera bränsleångor innan de kan fly in i atmosfären.Detta hjälper inte bara miljön genom att mins...på 1970/01/1 63100
-

Kvalitet (Q) Faktor: Ekvationer och applikationer
Kvalitetsfaktorn, eller 'Q', är viktig när man kontrollerar hur väl induktorer och resonatorer arbetar i elektroniska system som använder radiofrekvenser (RF).'Q' mäter hur väl en krets minimerar e...på 1970/01/1 63040
-

Uppnå toppprestanda med den maximala kraftöverföringssatsen
Den maximala kraftöverföringssatsen förklarar hur energi från en källa, till exempel ett batteri eller generator, flyter till en ansluten belastning.Det visar det exakta tillståndet där lasten får ...på 1970/01/1 54097
-

A23 -batterispecifikationer och kompatibilitet
A23-batteriet är ett litet, cylinderformat batteri med högspänning.Även kallad 23A, 23AE eller MN21, den körs vid 12 volt och mycket högre än AA- eller AAA -batterier.Dess speciella design...på 1970/01/1 52184
Hett artikelnummer
-

HMC213AMS8E
Analog Devices Inc.
IC MIXER 1.5-4.5GHZ 8MSOP
GRM0225C1H120JA03L
Murata Electronics
CAP CER MLCC
1808CA561JBT9A
KYOCERA AVX
CAP CER 560PF 630V NP0 1808
C1005X6S1E224M050BC
TDK Corporation
CAP CER 0.22UF 25V X6S 0402
VI-BW0-EV
Vicor Corporation
DC DC CONVERTER 5V 150W
1812HA150JAT1A
KYOCERA AVX
CAP CER 15PF 3KV C0G/NP0 1812
LT3960JMSE#PBF
Analog Devices Inc.
IC TRANSCEIVER FULL 1/1 10MSOP
SY58610UMG
Microchip Technology
IC MULTIPLEXER 2 X 2:1 16MLF
MAX8556ETE+T
Analog Devices Inc./Maxim Integrated
IC REG LINEAR POS ADJ 4A 16TQFN
ICL3237EIA
Intersil
IC TRANSCEIVER FULL 5/3 28SSOP
TPS3813I50QDBVRQ1
Texas Instruments
IC SUPERVISOR 1 CHANNEL SOT23-6
RN60D4990FB14
Vishay Dale
RES 499 OHM 1/4W 1% AXIAL
SS32-E3/9AT
Vishay General Semiconductor - Diodes Division
DIODE SCHOTTKY 20V 3A DO214AB
RD5.6M-T2B-A
Renesas
RD5.6M-T2B-A - ZENER DIODES 200
BCS-102-F-D-TE
Samtec Inc.
CONN RCPT 4POS 0.1 GOLD PCB
STM32G071KBU6TR
STMicroelectronics
CONTROLLER / PROCESSOR
GRM1886S1H181JZ01D
Murata Electronics
CAP CER 180PF 50V S2H 0603
P6SMB100CA
Good-Ark Semiconductor
TVS, BI-DIR, 600W, 100V, DO-214A -

ADUM3220ARZ-RL7
Analog Devices Inc.
DGTL ISO 2.5KV GATE DRIVER 8SOIC
B32529C1472J289
EPCOS - TDK Electronics
CAP FILM 4700PF 5% 100VDC RADIAL
PI6C20400SHEX
Diodes Incorporated
IC CLOCK BUFF 1:4 28-SSOP
ADG5412BRUZ-REEL7
Analog Devices Inc.
IC SW SPST-NOX4 10OHM 16TSSOP
TSV611AICT
STMicroelectronics
IC OPAMP GP 1 CIRCUIT SC70-5
12101C682KAT2A
KYOCERA AVX
CAP CER 6800PF 100V X7R 1210
18087C471KAT2A
KYOCERA AVX
CAP CER 470PF 500V X7R 1808
AOZ1281DI
Alpha & Omega Semiconductor Inc.
IC REG BUCK ADJ 1.8A 8DFN
MCP1316T-46LE/OT
Microchip Technology
IC SUPERVISOR 1 CHANNEL SOT23-5
MIC37100-1.8WS
Microchip Technology
IC REG LINEAR 1.8V 1A SOT223-3
TPS25221DRVT
Texas Instruments
IC CURRENT SWITCH 6% 6WSON
LQW15AN7N5H00D
Murata Electronics
FIXED IND 7.5NH 570MA 130MOHM SM
MT29C8G48MAZAPBJA-5 IT
Micron Technology Inc.
IC FLASH RAM 8GBIT PAR 137TFBGA
NTD5407NT4G
onsemi
MOSFET N-CH 40V 7.6A/38A DPAK
PMEG4010EGWX
Nexperia USA Inc.
DIODE SCHOTTKY 40V 1A SOD123
IGP20N65H5XKSA1
Infineon Technologies
IGBT 650V 42A TO220-3
MRF9060LSR1
NXP USA Inc.
FET RF 65V 945MHZ NI-360S
KSZ8842-16MBL
Microchip Technology
IC MAC CTLR 2PORT ETH 100-LFBGA -

MB3836PFV-G-BND-ERE1
Infineon Technologies
IC REGULATOR 20SSOP
UCC35705DG4
Texas Instruments
IC REG CTRLR MULT TOPOLOGY 8SOIC
LTC4267CDHC-3#TRPBF
Analog Devices Inc.
IC POE CNTRL 1 CHANNEL 16DFN
L5986TR
STMicroelectronics
IC REG BUCK ADJ 2.5A 8VFQFPN
FQT4N25TF
Fairchild Semiconductor
POWER FIELD-EFFECT TRANSISTOR, 0
EPF10K100EFC484-3
Intel
IC FPGA 338 I/O 484FBGA
STM32G030C6T6TR
STMicroelectronics
IC MCU 32BIT 32KB FLASH 48LQFP
TSPB15U45S S1G
Taiwan Semiconductor Corporation
DIODE SCHOTTKY 45V 15A SMPC4.0
VI-J4Z-IZ
Vicor Corporation
DC DC CONVERTER 2V 10W
DAC8554IPW
Texas Instruments
IC DAC 16BIT V-OUT 16TSSOP
AT49BV512-90VC
Microchip Technology
IC FLASH 512KBIT PARALLEL 32VSOP
ISO7420DR
Texas Instruments
DGTL ISO 2500VRMS 2CH GP 8SOIC
DBLS155G
Taiwan Semiconductor Corporation
BRIDGE RECT 1P 600V 1.5A DBLS
XR76208ELTR-F
MaxLinear, Inc.
IC REG BUCK ADJUSTABLE 8A 30QFN
VE-253-IW
Vicor Corporation
DC DC CONVERTER 24V 100W
SN74ALS251N
Texas Instruments
IC MULTIPLEXER 1 X 8:1 16DIP
MIC5305-3.3BD5
Microchip Technology
IC REG LIN 3.3V 150MA TSOT23-5
SMCJ30A
Microsemi Corporation
TVS DIODE 30VWM 48.4VC DO214AB