Introduktion till styrsystem: arbete, typer och tillämpningar
Du använder styrsystem närhelst en maskin håller ett värde stabilt automatiskt, som temperatur, hastighet eller nivå.Den här artikeln förklarar vad ett styrsystem är, hur dess delar fungerar tillsammans och hur återkoppling håller utdata korrekt.Du kommer också att se huvudtyperna av system och hur de beter sig i drift.Vanliga användningsområden, fördelar och gränser ingår.Katalog
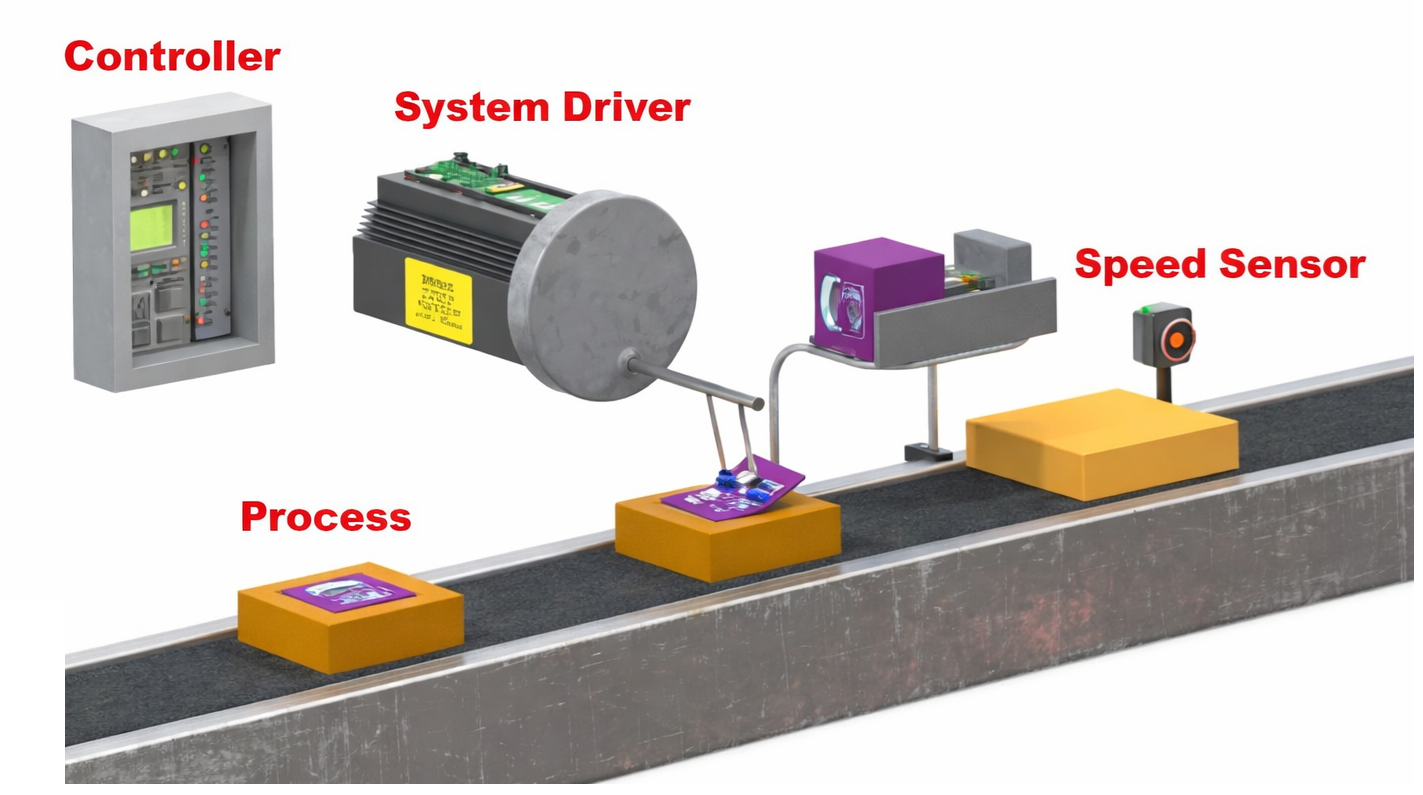
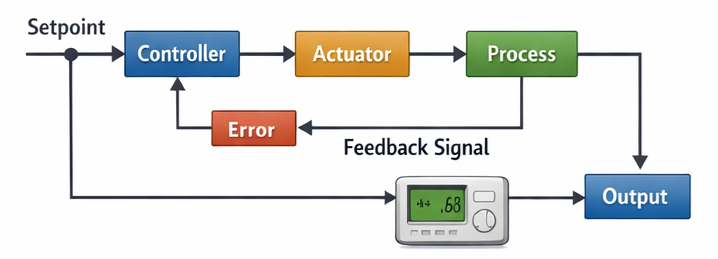
Figur 1. Exempel på styrsystem
Vad är ett kontrollsystem?
Ett styrsystem är ett system som håller ett uppmätt värde nära ett önskat målvärde.Dess syfte är att automatiskt justera en process så att utgången förblir korrekt även när förhållandena ändras.Till exempel håller en rumstermostat temperaturen nära den inställda nivån, och en bilfarthållare håller fordonet vid en vald hastighet.En nivåkontroll för vattentanken håller också vattenhöjden vid en vald markering.Enkelt uttryckt kontrollerar och korrigerar ett kontrollsystem kontinuerligt en variabel för att matcha det önskade värdet.
Grundläggande element i ett styrsystem
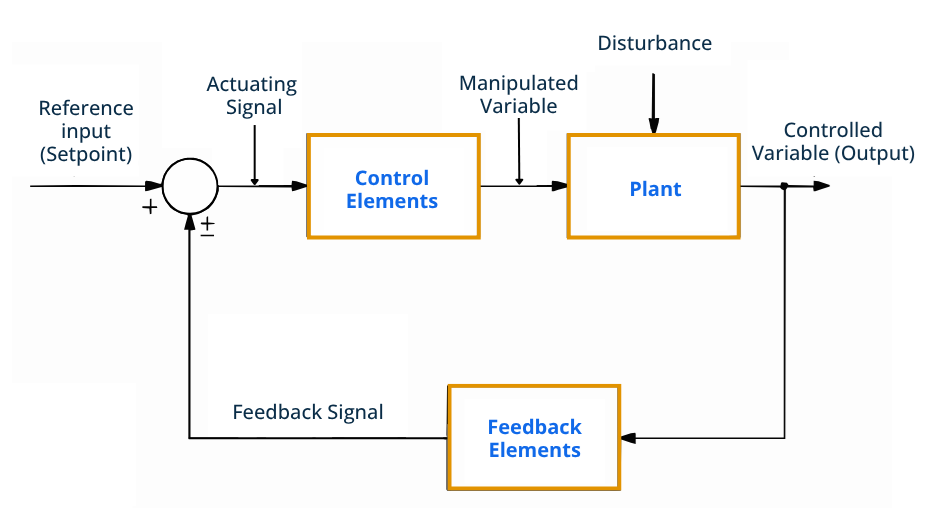
Figur 2. Blockdiagram för styrsystem
Ett styrsystem består av flera standarddelar som var och en utför en specifik uppgift.
• Referensingång (börvärde)
Detta är det önskade värdet som systemet försöker bibehålla.Det representerar det valda måltillståndet.Systemet jämför alltid det faktiska värdet med denna referens.
• Aktiveringssignal
Detta är signalen som produceras efter jämförelse av önskade och faktiska värden.Det visar hur mycket justering som behövs.Signalen förbereder systemet för korrigering.
• Kontrollelement
Dessa delar hanterar beslutsprocessen.De bestämmer den korrigerande åtgärden baserat på den mottagna signalen.Resultatet från detta steg förbereder processen för justering.
• Manipulerad variabel
Detta är den justerbara kvantiteten som skickas till processen.Ändring av detta värde påverkar den slutliga utmatningen.Det är variabeln systemet direkt kan variera.
• Plantera
Anläggningen är den process som styrs.Den producerar det slutliga utgångsvärdet.Systemet syftar till att hålla denna produktion på önskad nivå.
• Störning
Detta är en oönskad förändring som påverkar processen.Den kan skjuta utgången bort från det önskade värdet.Systemet måste kompensera för det.
• Styrd variabel (utgång)
Detta är det faktiska uppmätta resultatet av processen.Den visar systemets nuvarande tillstånd.Målet är att hålla det lika med referensinmatningen.
• Feedbackelement
Dessa mäter utdata och skickar tillbaka information för kontroll.De förser systemet med det nuvarande tillståndet.Detta gör att korrigering kan fastställas.
• Återkopplingssignal
Detta är den returnerade informationen om utdatavärdet.Det representerar processens tillstånd.Systemet använder det för jämförelse.
Arbetsprincipen för kontrollsystemet
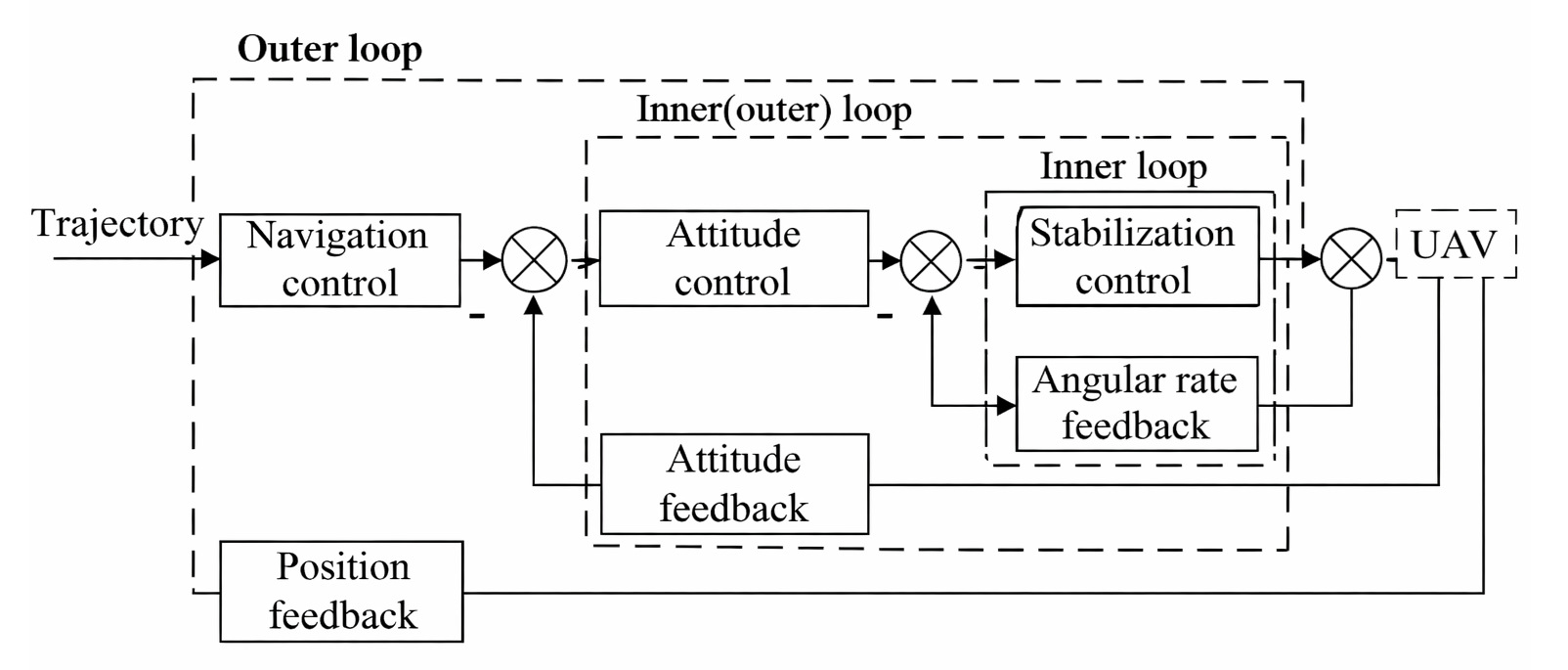
Figur 3. Arbetsprincipen för kontrollsystemet
Arbetsprincipen för ett styrsystem börjar med att ett önskat ingångsvärde ges till systemet.Systemet jämför sedan detta värde med det faktiska utvärdet.Skillnaden mellan dem kallas felsignalen.Om felet finns genererar systemet en korrigeringssignal.Denna korrigering justerar processen för att minska felet.Utgången ändras och kontrolleras kontinuerligt igen.Cykeln upprepas tills utgången stämmer överens med det önskade värdet.
Styrsystems egenskaper
Styrsystem utvärderas utifrån hur väl de presterar under drift.Dessa egenskaper beskriver kvaliteten och tillförlitligheten hos systemets respons.
|
Egenskaper |
Beskrivning |
|
Stabilitet |
Utgång gör det
inte divergera;återgår till konstant värde efter störning |
|
Noggrannhet |
Slutligt fel ≤
±2–5 % av inställt värde |
|
Precision |
Utgång
variation ≤ ±1 % under samma ingång |
|
Svarstid
|
Inledande
reaktion sker inom uppmätt fördröjningstid (td) |
|
Uppgångstid |
Tid från 10 %
till 90 % av slutvärdet |
|
Avvecklingstid |
Går in och
håller sig inom ±2 % band |
|
Överskjuta |
Toppen överstiger
slutvärde med % belopp |
|
Steady-State
Fel |
Konstant
återstående offset efter stabilisering |
|
Känslighet |
Δutgång /
ΔParameterändringsförhållande |
|
Robusthet |
Underhåller
drift trots störningsförändring |
|
Bandbredd |
Fungerar
effektivt upp till −3 dB gränsfrekvens |
|
Repeterbarhet |
Samma input
producerar samma utdata inom tolerans |
|
Tillförlitlighet |
Fungerar
utan fel för nominell drifttid (MTBF) |
|
Dämpning |
Oscillation
sönderfall bestäms av dämpningsförhållande ζ |
|
Hastighet på
Svar |
Total tid till
nå stabilt tillstånd |
Typer av styrsystem
Kontrollsystem klassificeras utifrån hur de hanterar information, signaler och svarsbeteende.De är grupperade efter feedbackanvändning, signalform och matematiskt beteende.
Öppen slinga kontrollsystem
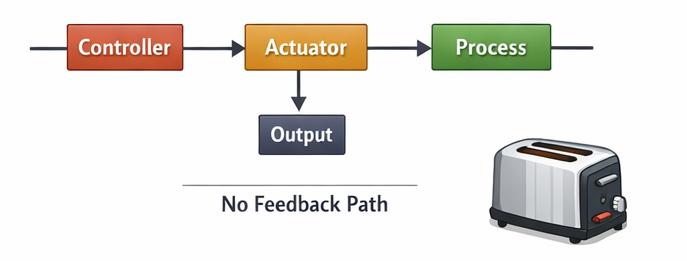
Figur 4. Diagram för styrsystem med öppen slinga
Ett styrsystem med öppen slinga är ett system där utgången inte påverkar styrningen.Systemet skickar ett kommando och antar att resultatet är korrekt utan att kontrollera det.Eftersom det inte finns någon återkopplingsväg kan den inte automatiskt korrigera fel eller störningar.Prestandan beror huvudsakligen på korrekt kalibrering och driftsförhållanden.Dessa system är enkla, billiga och lätta att designa.Däremot kan förändringar i belastning eller miljö påverka det slutliga resultatet.Vanliga exempel inkluderar en elektrisk brödrosttimer, tvättmaskinstimerstyrning och fast bevattningstimer.
Closed-loop kontrollsystem
Figur 5. Diagram för kontrollsystem med sluten slinga
Ett styrsystem med sluten krets är ett system som använder feedback för att justera sin uteffekt automatiskt.Systemet mäter resultatet och jämför det med önskat värde.Om en skillnad uppstår görs en korrigering för att minska felet.Denna kontinuerliga justering möjliggör exakt och stabil drift även när förhållandena varierar.Slutna system ger bättre precision och tillförlitlighet än system med öppen loop.De används ofta i moderna automatiska styrtillämpningar.Typiska exempel inkluderar luftkonditioneringstemperaturkontroll, fordonsfarthållare och automatiska spänningsregulatorer.
Kontinuerligt tidsstyrningssystem
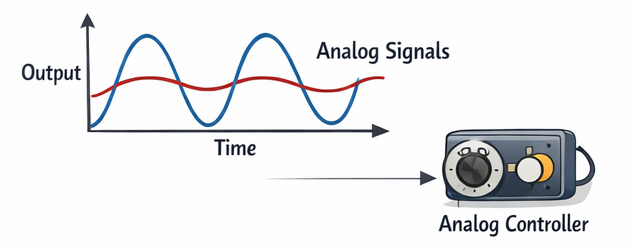
Figur 6. Kontinuerlig tid (analog) styrsignal
Ett kontinuerligt styrsystem bearbetar signaler som ändras smidigt över tiden.Ingången och utgången finns vid varje ögonblick utan avbrott.Dessa system fungerar vanligtvis med analoga elektriska eller mekaniska signaler.Eftersom signalerna är kontinuerliga är responsen också jämn och naturlig.Kontinuerliga tidssystem finns vanligtvis i traditionella analoga kontroller.De är lämpliga för fysikaliska processer som kräver omedelbar reaktion.Exempel inkluderar analoga hastighetsregulatorer, ljudförstärkarens volymkontroll och hydraulisk ventillägeskontroll.
Tidsdiskret kontrollsystem

Figur 7. Tidsdiskret (digital) styrsignal
Ett tidsdiskret styrsystem arbetar med hjälp av samplade datasignaler.Systemet kontrollerar och uppdaterar värden endast vid specifika tidsintervall.Dessa signaler behandlas vanligtvis av digitala styrenheter eller mikroprocessorer.Resultatet ändras steg för steg snarare än kontinuerligt.Sådana system tillåter programmerbar drift och flexibel justering.De används ofta i modern elektronisk och datorbaserad styrning.Exempel inkluderar mikrokontrollerbaserad temperaturkontroll, digital motorhastighetskontroll och smarta hemtermostater.
Linjärt styrsystem
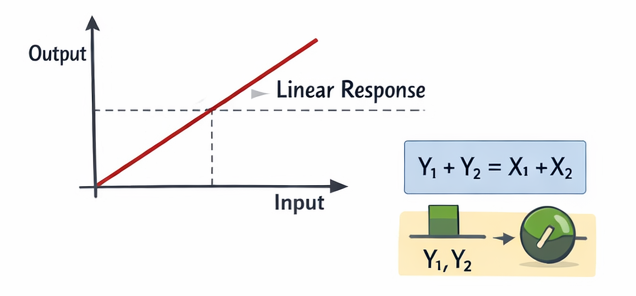
Figur 8. Linjärt system Input-Output Relation
Ett linjärt styrsystem följer ett proportionellt förhållande mellan input och output.Om ingången fördubblas, fördubblas också utsignalen under samma förhållanden.Dessa system uppfyller superpositionsprincipen där kombinerade ingångar ger kombinerade utgångar.Linjärt beteende möjliggör förutsägbar och enkel matematisk analys.De flesta teoretiska styrkonstruktioner antar linjär drift för enkelhetens skull.Linjära modeller hjälper till att designa stabila och exakta system.Exempel inkluderar elektroniska förstärkare med små signaler och motorstyrningsområden med låg belastning.
Icke-linjärt styrsystem
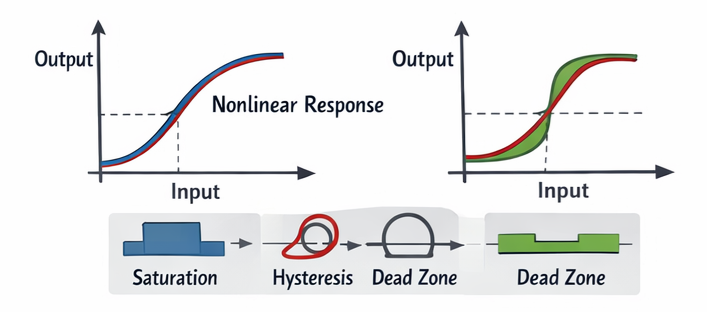
Figur 9. Icke-linjära systemresponsegenskaper
Ett olinjärt styrsystem har en utgång som inte är proportionell mot ingången.Responsen ändras beroende på driftområde eller förhållanden.Små indataändringar kan ge stora outputvariationer eller ingen förändring alls.Effekter som mättnad, hysteres och döda zoner uppträder ofta.Dessa system är svårare att analysera men representerar fysiska processer mer exakt.Många system beter sig naturligt på ett olinjärt sätt.Exempel inkluderar robotarmrörelsegränser, magnetiskt manöverdons beteende och ventilflödeskontroll vid extrema positioner.
Fördelar och nackdelar med styrsystem
Styrsystem förbättrar konsekvens och minskar manuell ansträngning men introducerar också komplexitet och kostnad.
Fördelar med styrsystem
• Systemet håller utgången nära önskat värde under drift.
• Operatörer behöver inte fortsätta justera utrustningen för hand.
• Maskiner kan köras under långa timmar utan frekventa stopp.
• Systemet korrigerar förändringar i förhållandena automatiskt.
• Driftstatus kan kontrolleras från en panel eller fjärrdisplay.
Nackdelar med styrsystem
• Installationskostnaden är högre än enkla manuella system.
• Utbildad personal behövs för installation och service.
• Sensorer och elektroniska delar kan gå sönder med tiden.
• Att hitta orsaken till problemen kan ta längre tid.
• Systemet är beroende av stabil elektrisk effekt.
Tillämpningar av styrsystem
Styrsystem används i både industriell automation och daglig utrustning för att bibehålla korrekt drift automatiskt.
1. Industriell tillverkning
Produktionsmaskiner upprätthåller konsekventa produktdimensioner och kvalitet.Automatiserade monteringslinjer använder reglering för att säkerställa repeterbarhet.Detta minskar avfallet och förbättrar effektiviteten.
2. Temperaturreglering
Värme- och kylutrustning upprätthåller bekväma miljöförhållanden.Byggnader är beroende av automatisk justering för att stabilisera inomhusklimatet.Detta förbättrar energieffektiviteten och komforten.
3. Transportsystem
Fordon använder hastighets- och stabilitetskontroll för smidigare drift.Moderna bilar inkluderar farthållare och dragsystem.Dessa förbättrar körsäkerhet och prestanda.
4. Kraftsystem
Elektriska nät reglerar spännings- och frekvensnivåer.Generatorer justerar uteffekten för att matcha belastningsbehovet.Detta säkerställer en stabil elförsörjning.
5. Robotik och automation
Robotar utför exakta positionerings- och rörelseuppgifter.Automatiserade maskiner arbetar kontinuerligt med hög precision.Detta möjliggör avancerad tillverkning.
6. Medicinsk utrustning
Enheter upprätthåller kontrollerade driftsförhållanden under behandlingen.Övervakningsutrustning håller värden inom säkra gränser.Detta förbättrar patientsäkerheten och tillförlitligheten.
7. Hushållsapparater
Dagliga enheter hanterar automatiskt driftinställningar.Tvättmaskiner och kylskåp upprätthåller korrekta driftsförhållanden.Detta förenklar de dagliga uppgifterna.
8. Flyg- och rymdsystem
Flygplan och drönare upprätthåller stabila flygförhållanden.Automatisk vägledning håller rätt orientering och höjd över havet.Detta stöder tillförlitlig navigering.
Styrsystem vs automation vs inbyggda system
Dessa teknologier är nära besläktade men tjänar olika tekniska syften inom moderna elektroniska och industriella produkter.
|
Funktion |
Kontroll
System |
Automation |
Inbäddad
System |
|
Huvudfokus |
Reglering av
variabler |
Process
avrättning |
Enhet
operation |
|
Syfte |
Underhåll
önskat värde |
Utför uppgifter
automatiskt |
Kör dedikerat
funktioner |
|
Omfattning |
Specifik
processbeteende |
Hela
arbetsflöde
|
Singel
produktens enhet |
|
Beslut
Förmåga |
Baserat på
uppmätta värden |
Baserat på
programmerad logik |
Baserat på
firmware |
|
Feedback Användning |
Ofta
krävs |
Valfritt |
Valfritt |
|
Hårdvarutyp |
Sensorer och
ställdon |
Maskiner och
kontroller |
Mikrokontroller
styrelse |
|
Mjukvaruroll |
Beräkning
och korrigering |
Sekvensering
och samordning |
Enhet
styrlogik |
|
Svarstyp |
Kontinuerlig
justering |
Uppgift
avrättning |
Funktionell drift |
|
Systemstorlek |
Liten till
medium |
Medium till
stora |
Mycket liten |
|
Flexibilitet |
Måttlig |
Hög |
Begränsad |
|
Tid
Krav |
Hög |
Måttlig |
Hög |
|
Ansökan
Nivå |
Processnivå |
Växtnivå |
Produktnivå |
|
Exempel |
Temperatur
kontroll |
Fabrik
produktionslinje |
Smart klocka |
|
Integration |
En del av
automatisering |
Innehåller
kontrollsystem |
Stöder båda |
Slutsats
Styrsystem upprätthåller stabiliteten genom att kontinuerligt jämföra den faktiska effekten med ett målvärde och korrigera eventuella fel.Deras prestanda beror på kärnelement som feedback, kontrollåtgärder och den kontrollerade processen.Olika klassificeringar definierar hur signaler hanteras och hur exakt ett system reagerar på störningar.På grund av dessa möjligheter används styrsystem i stor utsträckning inom industri, transport, energi, medicinsk utrustning och daglig utrustning.
Om oss
ALLELCO LIMITED
Läs mer
Snabb förfrågan
Skicka en förfrågan, vi svarar omedelbart.
Vanliga frågor [FAQ]
1. Vad är skillnaden mellan en styrenhet och ett styrsystem?
En regulator är bara den beslutande enheten (som en PLC eller PID-regulator).Ett styrsystem inkluderar regulatorn plus sensorer, ställdon och processen som regleras.
2. Vad är PID-kontroll och varför är det viktigt?
PID-kontroll använder proportionella, integrerade och derivativa åtgärder för att minimera fel snabbt och smidigt.Det förbättrar stabilitet, noggrannhet och svarshastighet i de flesta industriella system.
3. Varför svänger eller jagar styrsystem ibland?
Oscillation uppstår när korrigeringarna är för aggressiva eller försenade.Dålig inställning, långsamma sensorer eller överdriven förstärkning gör att utsignalen överskrids upprepade gånger.
4. Vad är ställdonets mättnad?
Ställdonsmättnad inträffar när ställdonet når sin fysiska gräns och inte kan öka uteffekten ytterligare.Detta förhindrar att systemet korrigerar stora fel.
5. Hur hanterar kontrollsystemen förseningar i processer?
De använder inställningsmetoder, filter eller prediktiva algoritmer för att kompensera för fördröjning så att korrigeringen sker vid rätt tidpunkt.

4,7 kΩ Resistor Guide: Färgkod, användningsområden, testning och värdejämförelse
på 2026/02/16

Miniatyrbrytare (MCB): Arbetsprincip, typer, klassificeringar och urvalsguide
på 2026/02/15
Populära inlägg
-

Komplexa instruktionsuppsättningsdatorer: Hur de ändrade datoranvändning?
på 8000/04/18 147757
-

USB-C-pinout och funktioner
på 2000/04/18 111934
-

Använda Xilinx Unified Simulation Primitives: En omfattande guide till FPGA -design och simulering
på 1600/04/18 111349
-

Strömförsörjningsspänningar i elektronik: Betydelsen av VCC, VDD, VEE, VSS och GND
på 0400/04/18 83719
-

RJ45 -anslutningsguide: Pinout, ledningar, kabeltyper och användningar
på 1970/01/1 79508
-

Den ultimata guiden för trådfärgkoder i moderna elektriska system
Hur våra elektriska system använder färger är inte bara för utseende.Varje trådfärg indikerar nu en specifik funktion, vilket gör det lättare att identifiera och hantera elektriska komponenter korr...på 1970/01/1 66898
-

Kvalitet (Q) Faktor: Ekvationer och applikationer
Kvalitetsfaktorn, eller 'Q', är viktig när man kontrollerar hur väl induktorer och resonatorer arbetar i elektroniska system som använder radiofrekvenser (RF).'Q' mäter hur väl en krets minimerar e...på 1970/01/1 63010
-

Purge Valve Guide: Funktion, symtom, testning och ersättning för optimal motorprestanda
Purge -ventilen är en viktig del av bilens system som hjälper till att hålla luften ren genom att hantera bränsleångor innan de kan fly in i atmosfären.Detta hjälper inte bara miljön genom att mins...på 1970/01/1 63006
-

Uppnå toppprestanda med den maximala kraftöverföringssatsen
Den maximala kraftöverföringssatsen förklarar hur energi från en källa, till exempel ett batteri eller generator, flyter till en ansluten belastning.Det visar det exakta tillståndet där lasten får ...på 1970/01/1 54081
-

A23 -batterispecifikationer och kompatibilitet
A23-batteriet är ett litet, cylinderformat batteri med högspänning.Även kallad 23A, 23AE eller MN21, den körs vid 12 volt och mycket högre än AA- eller AAA -batterier.Dess speciella design...på 1970/01/1 52118
Hett artikelnummer
-

VOD217T
Vishay Semiconductor Opto Division
OPTOISOLATOR 4KV 2CH TRANS 8SOIC
594D107X9016C2T
Vishay Sprague
CAP TANT 100UF 10% 16V 2812
C1608JB1E685K080AC
TDK Corporation
CAP CER 6.8UF 25V JB 0603
MAX14753EUE+T
Analog Devices Inc./Maxim Integrated
IC SWITCH SP4TX2 130OHM 16TSSOP
LMV7291MG
Texas Instruments
IC COMPARATOR 1 GEN PUR SC70-5
2SK4087LS-1E
onsemi
MOSFET N-CH 600V 9.2A TO220F-3FS
SN89019B0RSLR
Texas Instruments
PROTOTYPE
AT32UC3B164-Z1UT
Microchip Technology
IC MCU 32BIT 64KB FLASH 48QFN
LTC1821-1BCGW#TRPBF
Analog Devices Inc.
IC DAC 16BIT V-OUT 36SSOP
TL084CPT
STMicroelectronics
IC OPAMP JFET 4 CIRCUIT 14TSSOP
C1608X7S0J685K080AC
TDK Corporation
CAP CER 6.8UF 6.3V X7S 0603
08055C823K4T2A
KYOCERA AVX
CAP CER 0.082UF 50V X7R 0805
RT1206BRD073K3L
YAGEO
RES SMD 3.3K OHM 0.1% 1/4W 1206
S-13A1A12-E6T1U3
ABLIC Inc.
IC REG LINEAR 1.2V 1A 6HSOP
MAX8958EWW+T
Analog Devices Inc./Maxim Integrated
PMIC FOR SMART PHONE APPLICATION
MAX3386EIPWR
Texas Instruments
IC TRANSCEIVER FULL 3/2 20TSSOP
TLC7733IPWRG4
Texas Instruments
IC SUPERVISOR 1 CHANNEL 8TSSOP
INA2141PA
Burr Brown
IC INST AMP 2 CIRCUIT 16DIP -

UPC29M12T-E1-AZ
Renesas Electronics America Inc
IC REG LINEAR FIXED LDO REG
MCD224-22IO1
IXYS
MOD THYRISTOR/DIODE 2200V Y1-CU
VC060305A150RP
KYOCERA AVX
VARISTOR 8.5V 30A 0603
P1168.333NLT
Pulse Electronics
FIXED IND 33UH 2.2A 94 MOHM SMD
S-8521E15MC-BLAT2G
ABLIC Inc.
IC REG CTRLR BUCK SOT23-5
MAX3272AEGP-T
Analog Devices Inc./Maxim Integrated
LOW-POWER LIMITING AMPLIFIER
UCC2946PW
Texas Instruments
IC SUPERVISOR 1 CHANNEL 8TSSOP
MMO140-12IO7
IXYS
MODULE AC CONTROL 1200V ECO-PAC1
MMSZ5262B
Good-Ark Semiconductor
DIODE, ZENER, 0.5W, 51V,SOD-123
SP3087EEN-L
MaxLinear, Inc.
IC TRANSCEIVER FULL 1/1 8SOIC
LM358WDT
Rohm Semiconductor
IC OPAMP GP 2 CIRCUIT 8SO
MRF177
MACOM Technology Solutions
FET RF 2CH 65V 400MHZ 744A-01
744765110A
Würth Elektronik
FIXED IND 10NH 480MA 195MOHM SMD
CP2103-GMR
Silicon Labs
IC CTRLR BRIDGE USB-UART 28MLP
AOZ1320CI-05
Alpha & Omega Semiconductor Inc.
IC PWR SWITCH P-CHAN 1:1 SOT23-6
C1005X8R1H681K050BA
TDK Corporation
CAP CER 680PF 50V X8R 0402
SN74ABT162244DGGR
Texas Instruments
IC BUF NON-INVERT 5.5V 48TSSOP
TNPW060341K7BEEN
Vishay Dale
RES 41.7K OHM 0.1% 1/10W 0603 -

GRM155R61E105KE11D
Murata Electronics
CAP CER 1UF 25V X5R 0402
CL31C151JIFNNNE
Samsung Electro-Mechanics
CAP CER 150PF 1KV C0G/NP0 1206
GRM188R61A105KA61J
Murata Electronics
CAP CER 1UF 10V X5R 0603
ADL5501AKSZ-R7
Analog Devices Inc.
IC RF DETECT 50MHZ-6GHZ SC70-6
GRM188R61A475KAAJD
Murata Electronics
CAP CER 4.7UF 10V X5R 0603
APT38F80B2
Microchip Technology
MOSFET N-CH 800V 41A T-MAX
MOC8020
onsemi
OPTOISO 5.3KV DARLINGTON 6-DIP
1808AA100KAT1A
KYOCERA AVX
CAP CER 10PF 1KV C0G/NP0 1808
LFB2H2G45SG7A204
Murata Electronics
2450.0 MHZ MULTI LAYER CHIP
LK160847NM-T
Taiyo Yuden
FIXED IND 47NH 150MA 200MOHM SMD
GRM0335C1E220JA01D
Murata Electronics
CAP CER 22PF 25V C0G/NP0 0201
SN74LVC138APWR
Texas Instruments
IC DECODER/DEMUX 1X3:8 16TSSOP
32006-D22
Bussmann (Eaton)
MALE O/PUT TANG VERSION DCR 3749
JFW100A1
ABB Power Electronics Inc.
DC DC CONVERTER 5V 100W
CS51414GD8G
onsemi
IC REG BUCK ADJ 1.5A 8SOIC
P6SMB15CAT3
onsemi
TVS DIODE 12.8VWM 21.2VC SMB
NFA18SL407V1A45L
Murata Electronics
FILTER LC 400MHZ SMD
TIP41BG
onsemi
TRANS NPN 80V 6A TO220