Pulsbreddsmodulering (PWM) förklaras
Pulse Width Modulation (PWM) är ett enkelt och effektivt sätt att styra elkraft med hjälp av digitala signaler.Istället för att ändra matningsspänningen, justerar du hur länge signalen förblir PÅ och AV inom varje cykel för att kontrollera strömtillförseln.Den här artikeln hjälper dig att förstå hur PWM fungerar, hur arbetscykeln påverkar uteffekten och varför PWM används i stor utsträckning i elektronik och styrsystem.Du kommer också att se hur PWM tillämpas i kontroller, vågformstyper och applikationer.Katalog
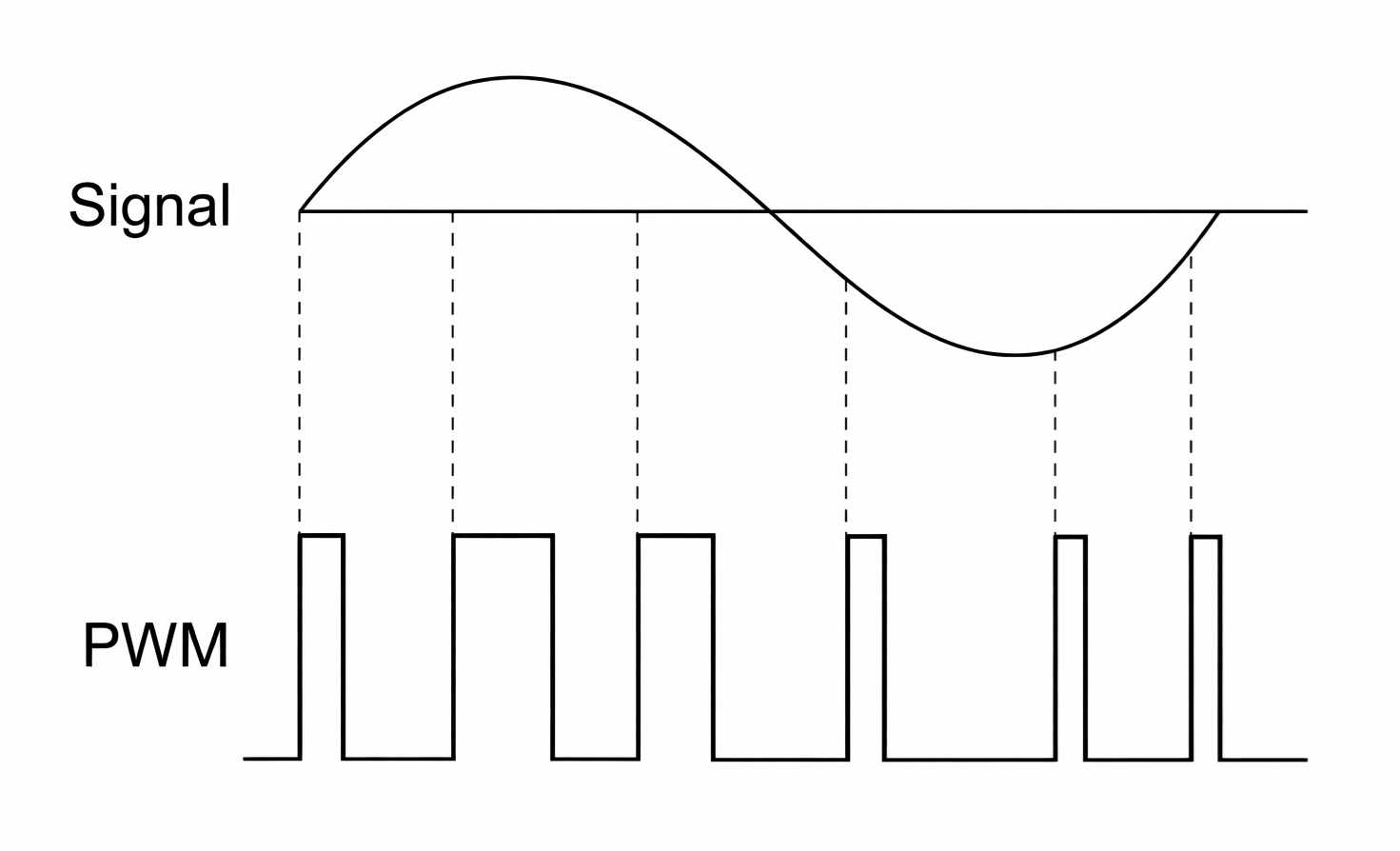
Figur 1. Pulsbreddsmoduleringskoncept
Vad är pulsbreddsmodulering?
Pulse Width Modulation (PWM) är en digital styrteknik som används för att reglera elektrisk effekt som levereras till en last genom att variera andelen PÅ-tid inom en fast kopplingsperiod.Istället för att ändra matningsspänningsnivån styr PWM den effektiva effekten genom att snabbt växla signalen mellan helt PÅ och helt AV.Detta tillvägagångssätt möjliggör effektiv effektreglering med minimal energiförlust, vilket gör att PWM används i stor utsträckning i motordrifter, LED-styrning, effektomvandlare och inbyggda styrsystem.
Hur fungerar pulsbreddsmodulering?
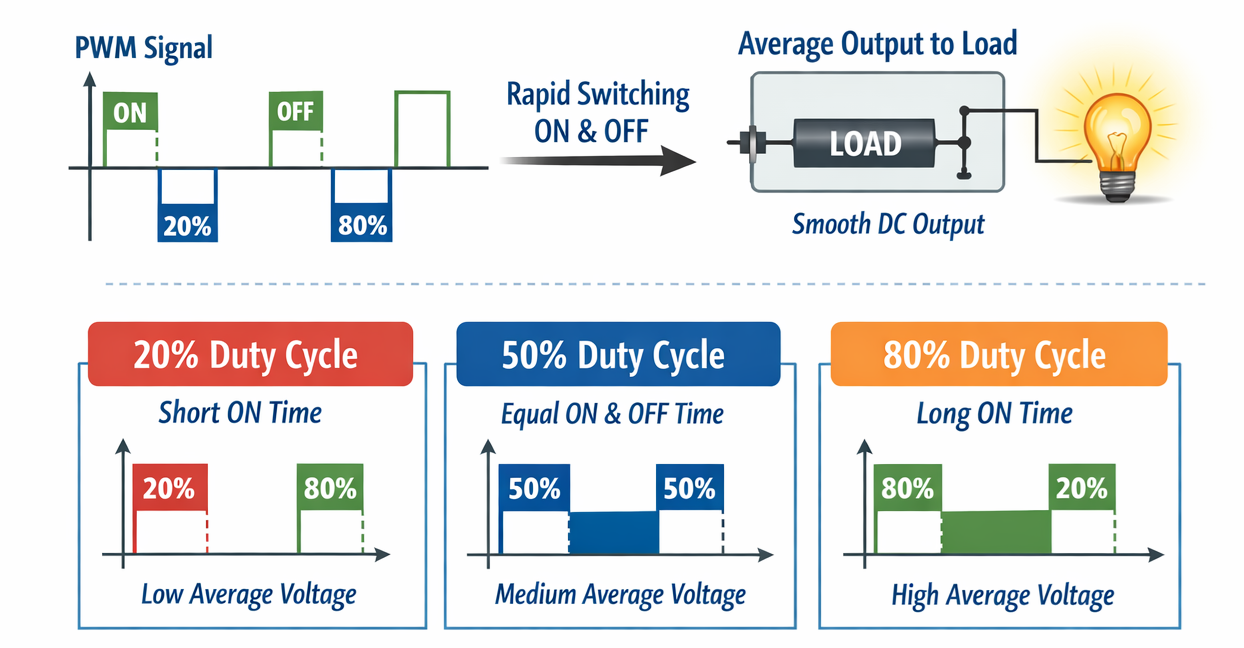
Figur 2. PWM-arbetsprincip
Pulsbreddsmodulering fungerar genom att upprepade gånger slå PÅ och AV utsignalen med en konstant frekvens.Under varje omkopplingscykel förblir signalen PÅ under en viss tid och AV under resten av cykeln.Förhållandet mellan PÅ-tiden och den totala cykeltiden kallas arbetscykeln, och det bestämmer direkt den genomsnittliga spänningen och strömmen som levereras till lasten.En högre driftcykel ökar levererad effekt, medan en lägre driftcykel minskar den.
Eftersom omkopplingsfrekvensen typiskt är mycket högre än belastningens elektriska eller mekaniska respons, reagerar belastningen på signalens medelvärde snarare än individuella pulser.Som ett resultat möjliggör PWM smidig och exakt effektkontroll med hjälp av digitala signaler utan att kräva variabla spänningskällor.
PWM-signalvågformsegenskaper
|
PWM
Karakteristiskt |
Beskrivning |
|
Pulsbredd |
PÅ tid
inom en PWM-cykel, från 0 mikrosekunder till full period. |
|
Arbetscykel |
Andel av
PÅ-tid per cykel, från 0 procent till 100 procent. |
|
PWM-frekvens |
Antal
cykler per sekund, vanligtvis 500 Hz till 100 kHz. |
|
PWM-period |
Total cykel
tid, typiskt 1 millisekund till 10 mikrosekunder. |
|
Signal
Amplitud |
Spänningsnivå
av PWM-signalen, vanligtvis 3,3 V, 5 V eller 12 V. |
|
Hög spänning
Nivå |
Spänning
under ON-tillstånd, lika med matningsspänning. |
|
Låg spänning
Nivå |
Spänning
under AV-läge, vanligtvis 0 V. |
|
Uppgångstid |
Dags att
växla från låg till hög, ofta 10 ns till 1 µs. |
|
Hösttid |
Dags att
växla från hög till låg, ofta 10 ns till 1 µs. |
|
Byter
Hastighet |
Maxpris
av tillståndsändring, stöder högfrekvent PWM. |
|
Upplösning |
Antal
arbetssteg, vanligtvis 8 bitar eller 10 bitar. |
|
Signal
Stabilitet |
Konsekvens
av frekvens och arbetscykel över tid. |
|
Jitter |
Liten timing
variation, vanligtvis mindre än 1 procent. |
|
Död tid |
Avsiktligt
fördröjning mellan omkoppling, vanligtvis 100 ns till 5 µs. |
|
Övertoner |
Högfrekvent
komponenter som genereras genom snabb omkoppling. |
|
Power Control |
Uteffekt
varierar linjärt med arbetscykeln. |
|
Ladda svar |
Förmåga att
bibehålla vågformen under belastningsändringar. |
|
Filtrering
Utgång |
Filtrerad PWM
producerar jämn likspänning. |
|
Buller
Immunitet |
Motstånd mot
interferens förbättras med rena kanter. |
Typer av pulsbreddsmodulering
Pulsbreddsmodulering kan klassificeras i olika styrstrategier baserat på hur den utgående vågformen är formad.Dessa PWM-typer fokuserar på moduleringskoncept och styralgoritmer som påverkar utspänning, harmonisk prestanda och effektivitet.
Enkelpulsbreddsmodulering (Single-Pulse PWM)
Figur 3. Enkelpuls PWM-vågform
Single-Pulse PWM använder en omkopplingspuls per halvcykel av den utgående vågformen.Bredden på denna enda puls justeras för att styra utspänningsnivån.Eftersom endast en kopplingshändelse inträffar per halvcykel, förblir kopplingsförlusterna låga.Denna styrstrategi producerar dock högre harmonisk distorsion och används huvudsakligen i lågfrekventa och grundläggande effektstyrningsapplikationer där enkelhet prioriteras framför vågformskvalitet.
Multipelpulsbreddsmodulering (Multiple-Pulse PWM)
Figur 4. Multipelpuls PWM-vågform
Multipelpuls PWM delar upp varje halvcykel i flera mindre pulser istället för en enda stor puls.Genom att öka antalet pulser sprids övertonsenergi mot högre frekvenser, vilket förbättrar utsignalens vågformskvalitet.Denna PWM-typ erbjuder en balans mellan reducerad övertonsdistorsion och hanterbara kopplingsförluster, vilket gör den lämplig för industriella kraftomvandlare och motordrivna system.
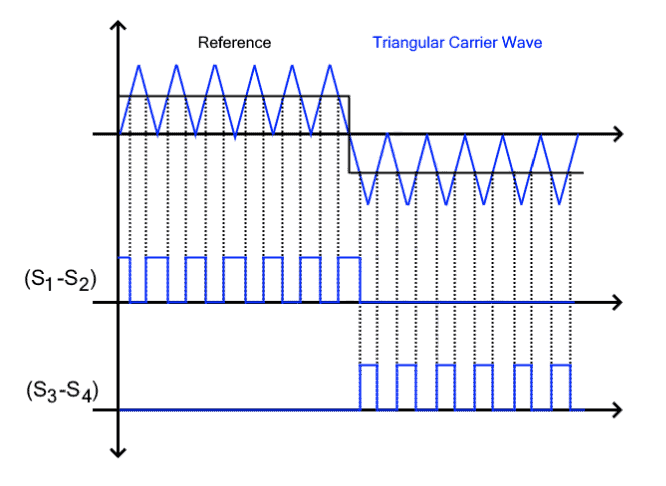
Sinusformad pulsbreddsmodulering (SPWM)
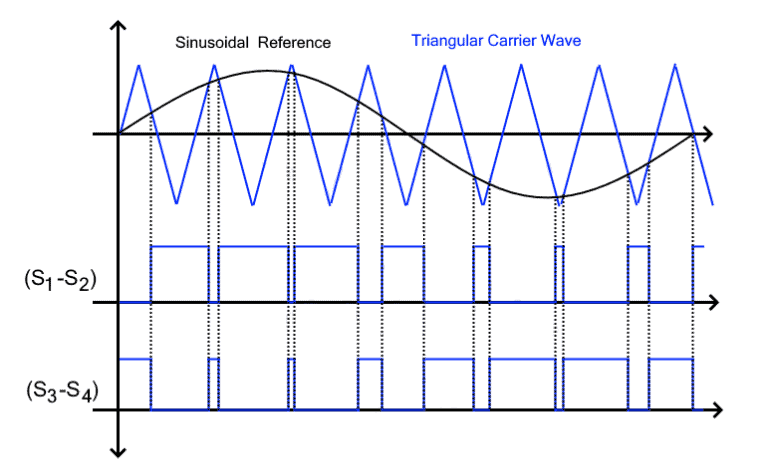
Figur 5. Sinusformad PWM-generering
Sinusformad PWM är en moduleringsstrategi som genererar pulser baserat på en sinusformad referenssignal.Pulsbredderna varierar i enlighet med referensvågformens momentana amplitud, vilket gör att utsignalen närmar sig en sinusvåg efter filtrering.SPWM används ofta i växelriktare, motordrifter och system för förnybar energi eftersom det ger bra harmonisk prestanda med måttlig kontrollkomplexitet.
Space Vector Pulse Width Modulation (SVPWM)
Space Vector PWM är en avancerad styrstrategi som använder en matematisk vektormodell av växelriktaren snarare än direkt vågformsjämförelse.Den väljer optimala kopplingstillstånd för att approximera en roterande referensvektor i spänningsutrymmet.Jämfört med SPWM förbättrar SVPWM DC-bussens spänningsutnyttjande och minskar ytterligare harmonisk distorsion, vilket gör den lämplig för högpresterande motordrifter och industriella precisionsstyrsystem.
PWM-genereringsmetoder
PWM-signaler kan också kategoriseras efter hur pulserna genereras och justeras i hårdvaran.Dessa PWM-genereringsmetoder fokuserar på timerdrift, omkopplingssymmetri och pulsplacering, snarare än själva moduleringsstrategin.
Single-Edge PWM (Edge-Aligned PWM)
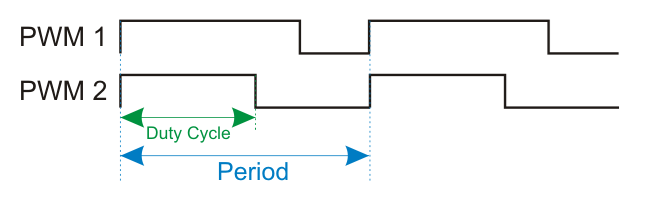
Figur 6. Edge-Aligned PWM Timing
Single-Edge PWM justerar alla pulser till en kant av kopplingsperioden, vanligtvis den stigande flanken.Arbetscykeln justeras genom att förlänga eller förkorta pulsen från denna fasta kant.Denna genereringsmetod är enkel att implementera med hjälp av hårdvarutimer och komparatorer, men dess asymmetriska kopplingsmönster kan öka harmonisk distorsion och elektromagnetisk störning.
Double-Edge PWM (Center-Aligned PWM)
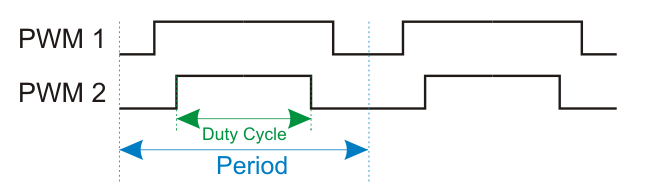
Figur 7. Center-Aligned PWM Timing
Double-Edge PWM centrerar pulsen inom kopplingsperioden genom att slå PÅ och AV symmetriskt runt mittpunkten.Denna symmetriska timing minskar harmonisk distorsion och elektromagnetiska störningar samtidigt som strömbalansen förbättras.På grund av dessa fördelar används centerjusterad PWM vanligtvis i precisionsmotordrifter och högpresterande effektstyrningsapplikationer.
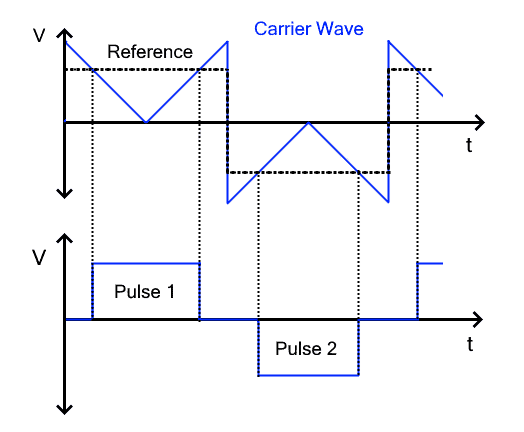
Carrier-Based PWM (Comparator PWM)
Bärvågsbaserad PWM genererar pulser genom att jämföra en referenssignal med en högfrekvent bärvåg med hjälp av en komparator.När referensen överstiger bärvågen slås utgången PÅ.Denna metod fungerar som hårdvarugenereringsgrunden för många PWM-styrstrategier, inklusive SPWM, och är allmänt implementerad i mikrokontroller, DSP:er och industriella kontroller.
PWM i mikrokontroller och kontroller
Pulsbreddsmodulering i Arduino
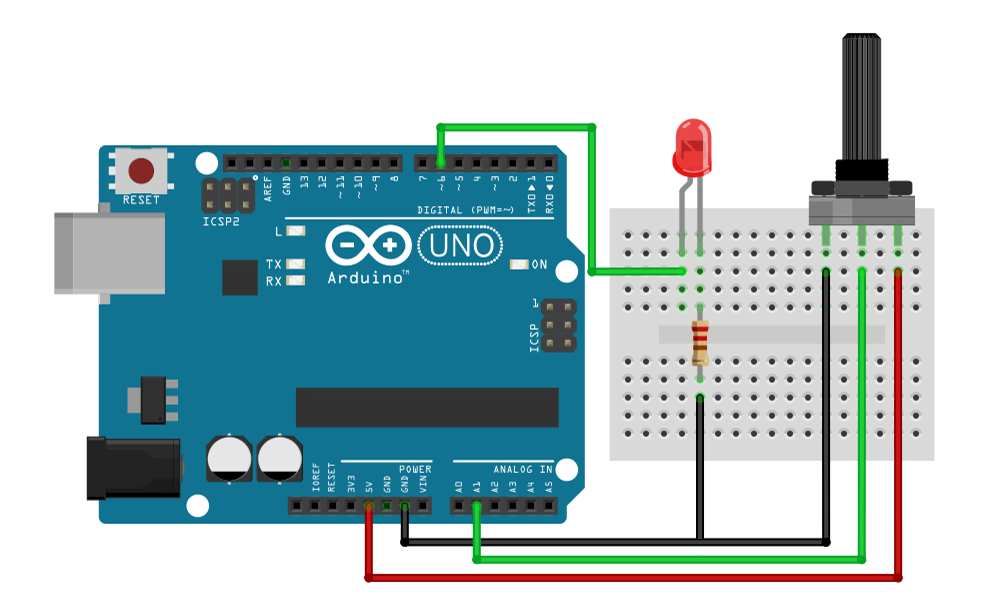
Figur 8. Arduino PWM LED-kontroll
Arduino genererar Pulse Width Modulation med hjälp av interna hårdvarutimers som växlar utgångsstiftet mellan HÖG och LÅG tillstånd.Duty cycle justeras genom mjukvara, som direkt styr medelspänningen som levereras till lasten.Genom att ändra driftcykeln kan Arduino smidigt variera LED-ljusstyrka eller motorhastighet utan att ändra matningsspänningen.PWM-frekvensen är vanligtvis fixerad av timerinställningarna, vilket säkerställer stabil drift under kontrolluppgifter.Som visas i figuren driver Arduino PWM-stiftet en lysdiod genom ett motstånd, vilket tydligt visar hur arbetscykelvariationen ändrar den synliga ljusstyrkan.
Pulsbreddsmodulering i ESP32
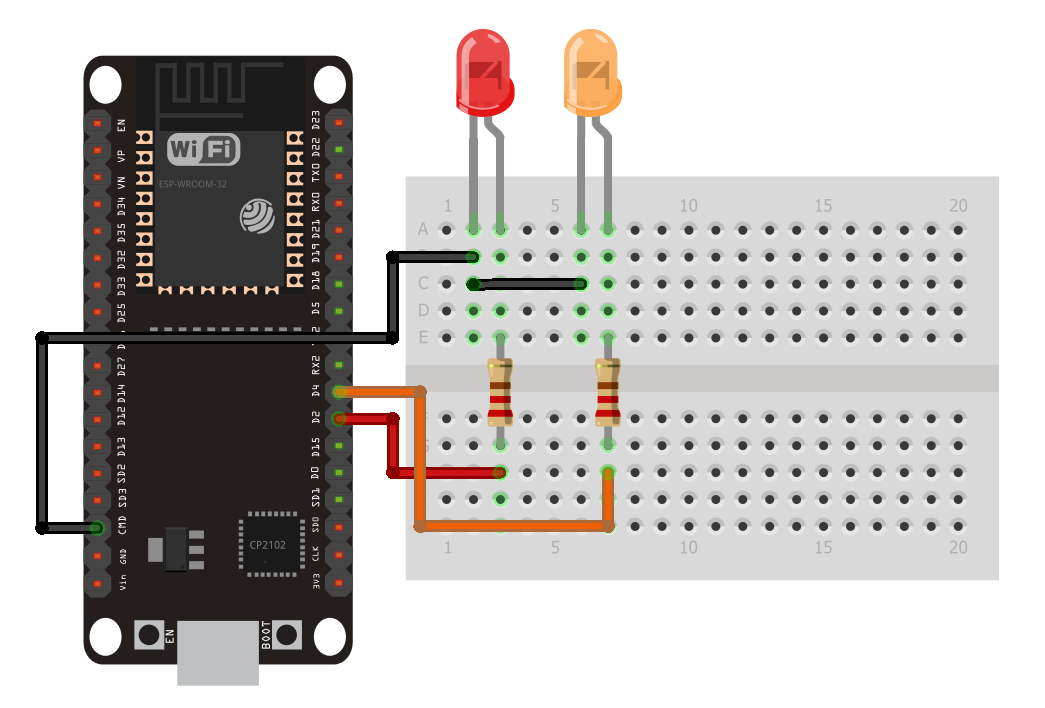
Figur 9. ESP32 PWM-utgångsexempel
ESP32 tillhandahåller avancerad pulsbreddsmodulering med dedikerade PWM-hårdvarumoduler.Den stöder högre upplösning, flera oberoende PWM-kanaler och flexibel frekvenskontroll utan att belasta processorn.Detta möjliggör exakt och responsiv effektkontroll för motorer, lysdioder och IoT-enheter.ESP32 PWM är speciellt lämplig för applikationer som kräver snabb respons och noggrann utgångsreglering.Figur 9 visar ESP32 som styr flera lysdioder med olika PWM-driftcykler, och illustrerar hur varje kanal oberoende justerar uteffekten.
Pulsbreddsmodulering i PLC:er
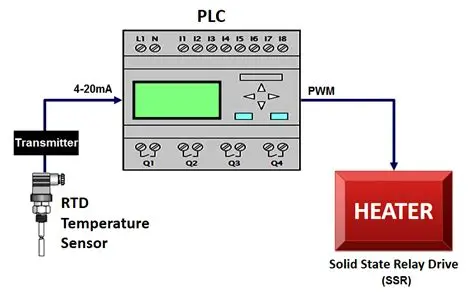
Figur 10. PLC PWM Värmestyrning
PLC:er använder pulsbreddsmodulering för att kontrollera industriella belastningar som värmare, motorer och ställdon med hög tillförlitlighet.PWM-utgången justeras baserat på sensorfeedback eller programmerad styrlogik för att reglera effekten exakt.Denna metod tillåter smidig kontroll samtidigt som den elektriska påfrestningen på omkopplingsenheter minimeras.PLC-baserad PWM är designad för att fungera tillförlitligt i elektriskt bullriga och tuffa industriella miljöer.Som visas i figuren använder PLC:n en PWM-signal för att driva ett halvledarrelä som styr värmarens effekt baserat på temperaturåterkoppling.
Tillämpningar av pulsbreddsmodulering
Pulsbreddsmodulering används i stor utsträckning för att styra ström effektivt och exakt i elektroniska applikationer med både låg effekt och hög effekt.
1. Motorhastighetskontroll
PWM används vanligtvis i DC-motorer, servomotorer och BLDC-motordrivenheter för att styra hastighet och vridmoment genom att variera medelspänningen som tillförs motorn.Denna metod ger smidig hastighetskontroll och hög effektivitet i robotik, industriell automation och elfordon.
2. LED-dimning och belysningskontroll
I LED-drivrutiner kontrollerar PWM ljusstyrkan genom att snabbt slå på och av lysdioden samtidigt som den håller en konstant strömnivå.Detta förhindrar färgskiftning, förbättrar effektiviteten och tillåter exakt justering av ljusstyrkan i displayer, fordonsbelysning och smarta belysningssystem.
3. Strömförsörjning och spänningsreglering
PWM är en kärnteknik i switch-mode nätaggregat, DC-DC-omvandlare och växelriktare.Det hjälper till att reglera utspänning och ström effektivt, vilket minskar värmegenereringen jämfört med linjära regulatorer.
4. Ljudsignalgenerering
PWM används i klass-D-ljudförstärkare för att omvandla ljudsignaler till högfrekventa omkopplingssignaler.Detta möjliggör ljudförstärkning med hög effekt med låg effektförlust och kompakt kretsdesign.
5. Värme- och temperaturkontroll
PWM styr effekt som levereras till värmare, värmeelement och temperaturkontrollsystem genom att justera till-/från-tiden för matningen.Detta ger en stabil temperaturreglering i industriella värmare, lödstationer och hushållsapparater.
6. Batteriladdning och energihantering
PWM används i batteriladdare och solenergiladdningsregulatorer för att hantera laddningsström och spänning.Detta förbättrar laddningseffektiviteten, skyddar batterier från överladdning och förlänger batteriets livslängd.
7. Mikrokontroller och inbyggda system
PWM-utgångar från mikrokontroller används i stor utsträckning för att generera analoga signaler, styra ställdon och gränssnitt med externa enheter.Detta gör PWM viktig i inbyggda system, IoT-enheter och kontrollapplikationer.
PWM vs linjär kontroll vs fasvinkelkontroll
|
Parameter |
PWM
Kontroll |
Linjär
Kontroll |
Fas
Vinkelkontroll |
|
Grundläggande kontroll
Metod
|
Utgång är
styrs av varierande arbetscykel |
Utgång är
styrs av linjärt spänningsfall |
Utgång är
styrs genom att fördröja AC-vågformsledning |
|
Typiskt utbud
Typ |
Likström
utbudet |
Likström
utbudet |
AC-ström
utbudet |
|
Styrsignal
Frekvens |
Vanligtvis 1
kHz till 100 kHz |
Noll
växlingsfrekvens |
Linje
frekvens på 50 Hz eller 60 Hz |
|
Effekteffektivitet |
Effektivitet
typiskt 85 procent till 98 procent |
Effektivitet
typiskt 30 procent till 60 procent |
Effektivitet
typiskt 70 procent till 90 procent |
|
Värmegenerering |
Värmeförlust är
låg på grund av växlingsdrift |
Värmeförlust är
hög på grund av spänningsfall |
Värmeförlust är
måttlig under partiell överledning |
|
Utspänning
förordning |
Genomsnittlig
spänningen styrs av arbetscykeln |
Utgång
spänningen följer styringången direkt |
RMS spänning
varierar med skjutvinkeln |
|
Kontrollupplösning |
Hög
upplösning med digitala timers |
Mycket hög
upplösning med analog kontroll |
Medium
upplösning begränsad av AC-vågform |
|
Kretskomplexitet |
Medium
komplexitet med omkopplingskomponenter |
Enkelt
krets med passelement |
Medium
komplexitet med hjälp av TRIAC eller SCR |
|
EMI och brus
Nivå |
EMI är
måttlig till hög utan filtrering |
EMI är mycket
låg |
EMI är högt
på grund av vågformsförvrängning |
|
Typisk växling
Enhet |
MOSFET eller
IGBT |
BJT eller linjär
regulator |
TRIAC eller SCR |
|
Svarshastighet |
Svarstid
är i mikrosekunder |
Svarstid
är i millisekunder |
Svarstid
beror på AC nollgenomgång |
|
Belastningskompatibilitet |
Bäst för
motorer lysdioder och effektomvandlare |
Bäst för låg
effekt analoga belastningar |
Bäst för
lampor värmare och AC-motorer |
|
Effektomfång |
Från 1 watt
till flera kilowatt |
Vanligtvis nedan
50 watt |
Vanligtvis från
100 watt till flera kilowatt |
|
Kontrollnoggrannhet |
Noggrannhet
beror på timerns upplösning |
Mycket exakt
och smidig kontroll |
Noggrannhet
påverkas av nätspänningsvariationer |
|
Vanliga applikationer |
Motorhastighet
styra SMPS LED-dimning |
Ljud
förstärkare sensorkretsar |
Ljusdimmer
fläktregulatorer värmestyrning |
Slutsats
Pulsbreddsmodulering ger effektiv och exakt effektkontroll genom att variera arbetscykeln för en omkopplingssignal.Olika PWM-typer och genereringsmetoder påverkar vågformens kvalitet, effektivitet och systemprestanda.PWM används ofta i mikrokontroller, PLC:er och kraftelektronik för motorer, belysning, effektomvandling och temperaturkontroll.Dess enkelhet och effektivitet gör den väsentlig i moderna elektroniska applikationer.
Om oss
ALLELCO LIMITED
Läs mer
Snabb förfrågan
Skicka en förfrågan, vi svarar omedelbart.
Vanliga frågor [FAQ]
1. Kan PWM skada motorer eller lysdioder om de används felaktigt?
Ja, felaktiga PWM-inställningar som mycket hög frekvens, dålig filtrering eller felaktigt val av drivrutin kan orsaka överhettning, brus eller förkortad livslängd.Användning av rätt PWM-frekvens och korrekta drivkretsar förhindrar skador.
2. Vilken PWM-frekvens är bäst för motorer, lysdioder och värmare?
Motorer använder vanligtvis PWM-frekvenser mellan 1 kHz och 20 kHz, lysdioder använder ofta 500 Hz till 5 kHz, och värmare kan använda mycket låga frekvenser som 1 Hz till 100 Hz.Den ideala frekvensen beror på belastningstyp och tillämpning.
3. Behöver jag ett filter när jag använder PWM för analoga signaler?
Ja, ett lågpassfilter rekommenderas när PWM används för att generera analogliknande spänningar.Filtrering jämnar ut PWM-vågformen och minskar rippel, vilket gör den lämplig för känsliga kretsar.
4. Vilka komponenter krävs för att bygga en PWM-styrkrets?
Ett grundläggande PWM-system kräver en styrenhet, omkopplingsenhet, drivkrets, strömförsörjning och belastning.Ytterligare komponenter som filter, skyddskretsar och kylflänsar kan behövas beroende på effektnivån.
5. Skapar PWM elektriskt brus eller störningar?
PWM-växling kan generera elektromagnetisk störning om den inte är korrekt utformad.Användning av skärmning, filtrering, korrekt jordning och korrekt växlingsfrekvens hjälper till att minska brusproblemen.

AD8542AR Dubbel operationsförstärkare Teknisk översikt
på 2026/01/13
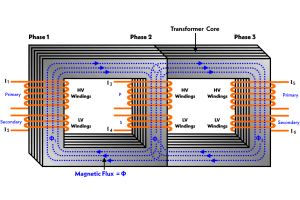
Fördelar och nackdelar med trefastransformatoranslutningar
på 2026/01/12
Populära inlägg
-

Komplexa instruktionsuppsättningsdatorer: Hur de ändrade datoranvändning?
på 8000/04/18 147758
-

USB-C-pinout och funktioner
på 2000/04/18 111949
-

Använda Xilinx Unified Simulation Primitives: En omfattande guide till FPGA -design och simulering
på 1600/04/18 111349
-

Strömförsörjningsspänningar i elektronik: Betydelsen av VCC, VDD, VEE, VSS och GND
på 0400/04/18 83722
-

RJ45 -anslutningsguide: Pinout, ledningar, kabeltyper och användningar
på 1970/01/1 79508
-

Den ultimata guiden för trådfärgkoder i moderna elektriska system
Hur våra elektriska system använder färger är inte bara för utseende.Varje trådfärg indikerar nu en specifik funktion, vilket gör det lättare att identifiera och hantera elektriska komponenter korr...på 1970/01/1 66920
-

Purge Valve Guide: Funktion, symtom, testning och ersättning för optimal motorprestanda
Purge -ventilen är en viktig del av bilens system som hjälper till att hålla luften ren genom att hantera bränsleångor innan de kan fly in i atmosfären.Detta hjälper inte bara miljön genom att mins...på 1970/01/1 63077
-

Kvalitet (Q) Faktor: Ekvationer och applikationer
Kvalitetsfaktorn, eller 'Q', är viktig när man kontrollerar hur väl induktorer och resonatorer arbetar i elektroniska system som använder radiofrekvenser (RF).'Q' mäter hur väl en krets minimerar e...på 1970/01/1 63012
-

Uppnå toppprestanda med den maximala kraftöverföringssatsen
Den maximala kraftöverföringssatsen förklarar hur energi från en källa, till exempel ett batteri eller generator, flyter till en ansluten belastning.Det visar det exakta tillståndet där lasten får ...på 1970/01/1 54081
-

A23 -batterispecifikationer och kompatibilitet
A23-batteriet är ett litet, cylinderformat batteri med högspänning.Även kallad 23A, 23AE eller MN21, den körs vid 12 volt och mycket högre än AA- eller AAA -batterier.Dess speciella design...på 1970/01/1 52145
Hett artikelnummer
-

1812HC102KAT1A
KYOCERA AVX
CAP CER 1000PF 3KV X7R 1812
ISO7240CDWR
Texas Instruments
DGTL ISO 2500VRMS 4CH GP 16SOIC
179228-7
TE Connectivity AMP Connectors
CONN RCPT HSG 7POS 2.00MM
AOT412
Alpha & Omega Semiconductor Inc.
MOSFET N-CH 100V 8.2A/60A TO220
VI-250-EV
Vicor Corporation
DC DC CONVERTER 5V 150W
TPS628502DRLR
Texas Instruments
IC REG BUCK ADJ 2A SOT583
MCIMX6D5EZK08AE
NXP USA Inc.
I.MX6D POP ARIK-D POP RO
GCJ21BR71H105KA01L
Murata Electronics
CAP CER 1UF 50V X7R 0805
MM74HCT74M
Fairchild Semiconductor
IC FF D-TYPE DUAL 1BIT 14SOIC
LV8414CS-N-TE-L-H
onsemi
IC MTR DRV BIPLR 2.5-5.5V 32WLPK
DLP11SN201HL2L
Murata Electronics
CMC 110MA 2LN 200 OHM SMD
MAX4544EUT+T
Analog Devices Inc./Maxim Integrated
IC SWITCH SPDT X 1 60OHM SOT6
TPS3705-33DR
Texas Instruments
IC SUPERVISOR 1 CHANNEL 8SOIC
WSL2512R0250FEA
Vishay Dale
RES 0.025 OHM 1% 1W 2512
MP24833GN
MPS (Monolithic Power Systems)
IC LED DRIVER
S-80122CNMC-JKHT2G
ABLIC Inc.
IC SUPERVISOR 1 CHANNEL SOT23-5
IRGSL15B60KDPBF
International Rectifier
IGBT W/ULTRAFAST SOFT RECOVERY D
IPD110N12N3GATMA1
Infineon Technologies
MOSFET N-CH 120V 75A TO252-3 -

UMK063CH180JT-F
Taiyo Yuden
CAP CER 18PF 50V CH 0201
XC74UL32AAMR
Torex Semiconductor Ltd
IC GATE OR 1CH 2-INP SOT26
HM2R10PA5101N9LF
Amphenol ICC (FCI)
CONN RECEPT 110POS 2MM PRESS-FIT
MAX354CPE+
Analog Devices Inc./Maxim Integrated
IC MUX 8:1 350OHM 16DIP
MIC29503WT
Microchip Technology
IC REG LINEAR POS ADJ 5A TO220-5
ISL28133FHZ-T7A
Renesas Electronics America Inc
IC OPAMP ZER-DRIFT 1CIRC SOT23-5
LTC2360CTS8#TRPBF
Analog Devices Inc.
IC ADC 12BIT SAR TSOT23-8
NC7WZ125K8X
onsemi
IC BUFFER NON-INVERT 5.5V US8
21011009014
HARTING
CONTACT PIN 24-28AWG CRIMP GOLD
ATMEGA162V-8AU
Microchip Technology
IC MCU 8BIT 16KB FLASH 44TQFP
AWL9280Q7
Skyworks Solutions Inc.
IC RF 802.11B G N2GHZ TX RX
74VHC164MX
Fairchild Semiconductor
SERIAL IN PARALLEL OUT, AHC/VHC/
TLV4172IPWR
Texas Instruments
IC OPAMP GP 4 CIRCUIT 14TSSOP
AD7091R-8BRUZ
Analog Devices Inc.
IC ADC 12BIT SAR 24TSSOP
MC74HC4316AFELG
onsemi
IC SW SPST-NO/NC 90OHM 16SOEIAJ
RF5500
RFMD
IC SWITCH WLAN SP3T 8DFN
XC7A100T-1CSG324I
AMD
IC FPGA 210 I/O 324CSBGA
BAT54S_R1_00001
Panjit International Inc.
SOT-23, SKY -

XC2C256-7TQG144C
AMD
IC CPLD 256MC 6.7NS 144TQFP
LM2902YDT
STMicroelectronics
IC OPAMP GP 4 CIRCUIT 14SO
SMAJ16CA
Yangzhou Yangjie Electronic Technology Co.,Ltd
TVS DIODE 16VWM 26VC DO214AC
MAX96717FGTJ/VY+
Analog Devices Inc./Maxim Integrated
TUNNELING, 3GB/S ONLY CSI-2 TO G
SMCJ60CA R6
Taiwan Semiconductor Corporation
TVS DIODE 1500W DO214AB SMC
NJU3716M
Nisshinbo Micro Devices Inc.
IC CONVERT SER-PAR 16 BIT SO24
TS90115CX
Taiwan Semiconductor Corporation
250MA 5V LOW QUIESCENT CURRENT C
AD5114BCPZ80-1-RL7
Analog Devices Inc.
IC DGTL POT 80KOHM 32TAP 8LFCSP
LTC2499IUHF#PBF
Analog Devices Inc.
IC ADC 24BIT SIGMA-DELTA 38QFN
STM6519APBBUB6F
STMicroelectronics
IC SUPERVISOR SMART RESET 6UDFN
AON7510
Alpha & Omega Semiconductor Inc.
MOSFET N-CH 30V 45A/75A 8DFN
ABM3B-16.000MHZ-B2-T
Abracon LLC
CRYSTAL 16.0000MHZ 18PF SMD
EL5257IY
Elantec
IC VOLTAGE FEEDBACK 2 CIRC 8MSOP
ISL6225CA
Intersil
DUAL SWITCHING CONTROLLER
APT39M60J
Microchip Technology
MOSFET N-CH 600V 42A ISOTOP
CLVTH16543IDGGREP
Texas Instruments
IC TXRX NON-INVERT 3.6V 56TSSOP
GCJ219R71H333KA01D
Murata Electronics
CAP CER 0.033UF 50V X7R 0805
LT1123CZ#TRPBF
Analog Devices Inc.
IC LNR REG CTRLR 1OUT TO92-3